





























208
Special operation and frequency control
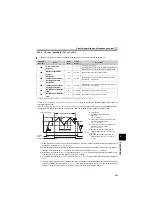
(1) PID control basic configuration
Pr. 128
= "20, 21" (measured value input)
(2) PID action overview
1)PI action
2)PD action
577
Output interruption
cancel level
1000%
900 to
1100%
Set the level (
Pr. 577
minus 1000%) at which the PID output interruption
function is canceled.
The above parameters can be set when
Pr. 160 Extended function display selection
="0".
∗1
Pr. 129, Pr. 130, Pr. 133 and Pr. 134
can be set during operation. They can also be set independently of the operation mode.
A combination of proportional control action (P) and integral control
action (I) for providing a manipulated variable in response to deviation
and changes with time.
[Operation example for stepped changes of process value]
(Note) PI action is the sum of P and I actions.
A combination of proportional control action (P) and differential control
action (D) for providing a manipulated variable in response to
deviation speed to improve the transient characteristic.
[Operation example for proportional changes of process value]
(Note) PD action is the sum of P and D actions.
Parameter
Number
Name
Initial
Value
Setting
Range
Description
+-
IM
PID operation
Pr. 133
or terminal 2
Set point
Inverter circuit
Motor
Feedback signal (measured value)
Terminal 4
Kp: Proportionality constant Ti: Integral time S: Operator Td: Differential time
Manipulated
variable
0 to 5VDC
(0 to 10VDC)
4 to 20mADC (0 to 5V, 0 to 10V)
Ti
S
Kp 1+ +Td S
1
Deviation
Set point
Measured value
Time
Time
Time
PI action
I action
P action
Deviation
Set point
Time
Time
Time
PD
action
D
action
P
action
Measured value
Содержание FR-D700 Series
Страница 11: ...VII MEMO ...
Страница 23: ...12 MEMO ...
Страница 57: ...46 MEMO ...
Страница 262: ...258 MEMO ...
Страница 276: ...272 MEMO ...
Страница 283: ...279 APPENDIX This chapter provides the APPENDIX of this product Always read the instructions before using the equipment ...
Страница 287: ...283 MEMO ...
Страница 289: ......







































































