





























Operation Manual of INVT CHS100 AC Servo Drive 6 Detailed parameter description
93
report a braking overload fault (Er-bCE) by mistake or cause burnout of the braking
resistor. The regenerative braking overload protection time is proportional to these two
parameters. When Pc.54=0, the internal braking resistor is active.
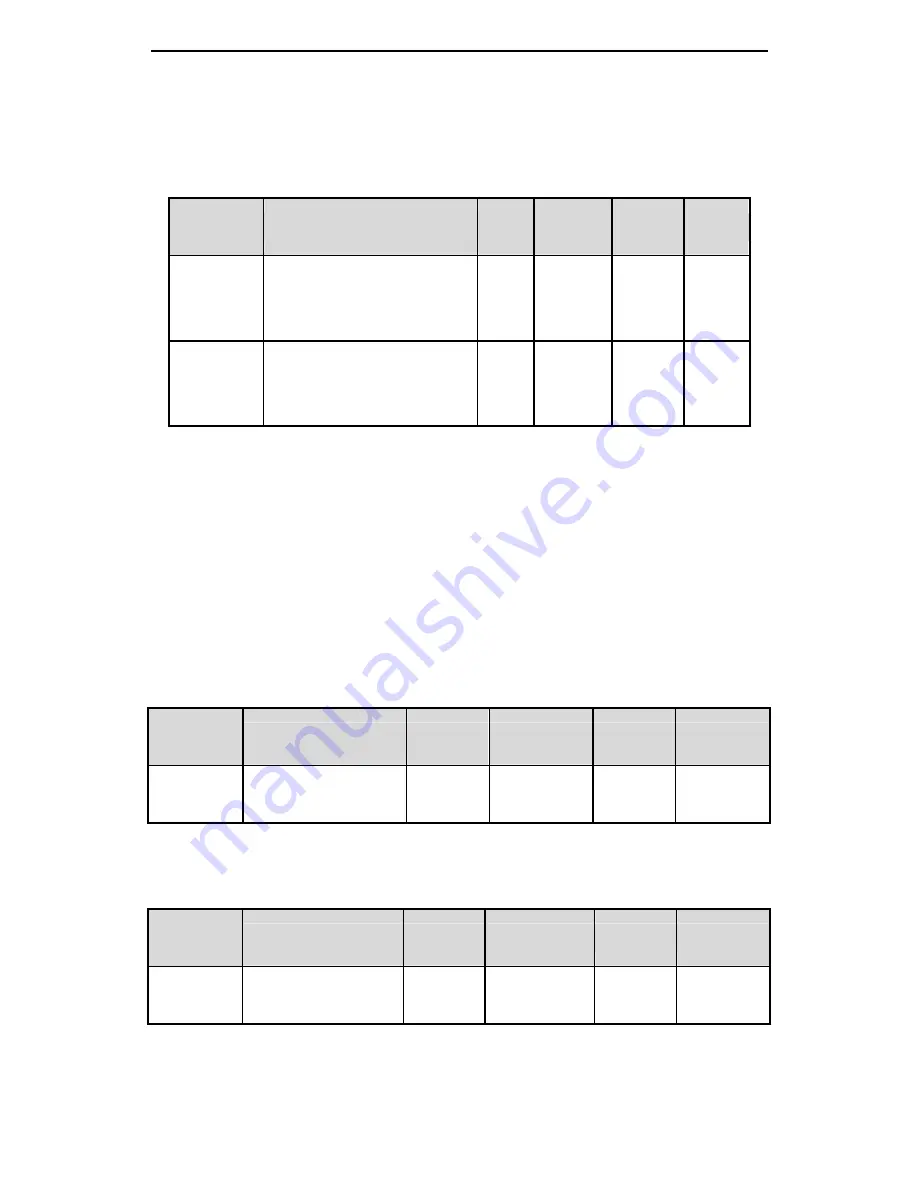
Function
code
Name
Unit
Range
Default
Mode
Pc.55
Numerator of the frequency
division coefficient of encoder
pulse output
1 0~10000
0 P.S.T
Pc.56
Denominator of the frequency
division coefficient of encoder
pulse output
1 1~10000
1 P.S.T
By setting the numerator and denominator of the frequency division coefficient of
encoder pulse output, the phase A and phase B signals of the encoder can be
frequency divided by any integer or decimal fraction and then outputted through the
encoder’s pulse output signal terminals (OA+, OA-, OB+, OB-).
It should be noted that in the position control mode, if the encoder output signal of the
preceding stage servo motor is used as the position pulse command input of the
succeeding stage servo drive, i.e. as start/stop type master-slave follow-up, in order to
ensure high positioning accuracy of the succeeding stage servo drive, the frequency
division coefficient must be 1:1. Otherwise the accuracy of master-slave position
follow-up will be affected in this case.
Function
code
Name
Unit
Range
Default
Mode
Pc.57
Pulse range for
over-position
pulse 0~50000 20000
P
This parameter is used to set the alarm threshold for the over-position fault (ER-oE). In
the position mode, when the number of retention pulses exceeds this setting, an
over-position fault alarm will be reported.
Function
code
Name
Unit
Range
Default
Mode
Pc.58
Polarity reversing of
digital quantity
- 00000~11111
00000 P
This parameter is used to reverse the polarity of the digital quantities. It is a binary