



























87
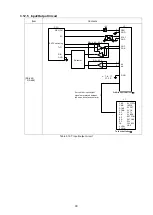
The encoder serial data communication protocol settings become as follows depending on the servo driver
selected with DIP SW2.
Table 3.12-3 Communication protocol according to the selected servo driver
(2)
Data code settings
DIP SW2 (SW2-4)
Set the serial data code type with this switch when connecting a Sanyo Denki servo driver. Hence, this
setting is invalid except when a Sanyo Denki servo driver is connected.
Bit 4
Data length
Remarks
OFF
8-bit binary
Valid only when a Sanyo Denki servo driver is
used.
ON
7-bit ASCII
Table 3.12-4 Data code setting table
(3)
DIP SW1
Not used in this module.
Item
Servo driver
Yaskawa Electric
(ABS-cum A-phase
type)
,
II,
III,
V
Sanyo Denki
AC/DC Servo System
Yaskawa Electric
(S-phase type)
,
II
Panasonic
A, AIII, A4, A4F, A5
(When binary is
selected)
(When ASCII is
selected)
DIP SW2 setting
No. 2
No. 1
No. 3
No. 0
Communication
protocol
RS-422
RS-422
RS-422
RS-485
Communication
system
Non-procedural,
start/stop system
Non-procedural,
start/stop system
Non-procedural,
start/stop system
ENQ-ACK,
start/stop system
Baud rate
9600bps
9600bps
9600bps
9600bps
Data length
7-bit ASCII
8-bit binary
7-bit ASCII
8-bit binary
7-bit ASCII
Start bit
1 bit
1 bit
1 bit
1 bit
Parity
Even
Even
Even
None
Stop bit
1 bit
1 bit
1 bit
1 bit
◼
indicates default setting
Содержание motionCAT HCPCI-MNT720M
Страница 1: ...Motion Network System motionCAT series User s Manual Introduction Hivertec inc http www hivertec co jp...
Страница 3: ......
Страница 12: ...1 Warnings and Precautions...
Страница 20: ...9 1 motionCAT Installation...
Страница 109: ...98 4 Installation Guide...
Страница 118: ...107 5 Device Driver Installation...
Страница 122: ...111 6 Trial Operation...
Страница 145: ...134 7 Accessories...
Страница 147: ...136 8 Glossary...
Страница 161: ...150 9 Connections to Drivers Supplied by Manufacturers...





















































