





























Documentation HG G-73650ZD | English, Revision 05 | Date: 09.03.2017 | www.goetting-agv.com
61
Chapter 4: Software
4.3.3.3 The omnidirectional vehicle
Figure 52
Example: Omnidirectional vehicle
On these vehicle, the vehicle zero point can be selected without restriction.
If an
axle only has a very small steering angle, it is advisable to set the vehicle zero point near to
this axle, as otherwise only very large steering radii can be driven.
4.3.3.4 Which wheels should be used for the odometry?
As a general principle, wheels 1 and 2 are used to calculate the odometry. The odometry is
all the better the greater the distance between the wheels. A requirement is that the appro-
priate sensor system has been fitted at the wheels. It is also possible to use an average
steering angle if the average speed is also available. What is decisive is that the speed and
steering angle values always match the point for which they are specified.
4.3.3.5 How are the positions specified on the vehicle?
The positions on the vehicle are always specified in the vehicle co-ordinate system in me-
tres or degrees. The angles in X direction are 0 and become more positive with rotation to
the left.
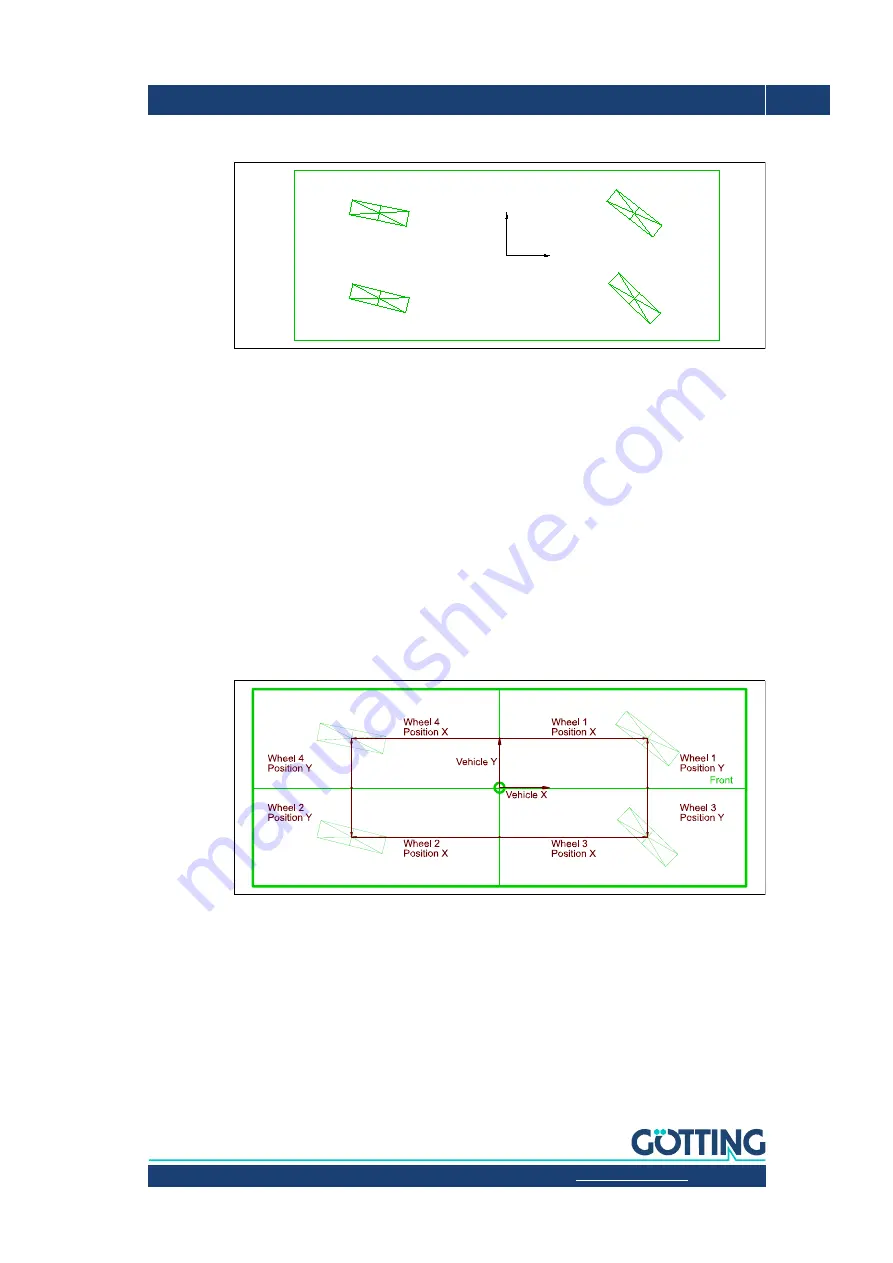
Figure 53
Specification of the position data to be determined for a vehicle
Vehicle X
Vehicle Y
Front
Example:







































































