





























DESIGNER’S HANDBOOK 4189350049C EN
Page 136 of 206
In some cases, NMEA0183 input is available as input source (requires NX2 NMEA i/o module). NMEA is however a
little special and requires its own dedicated setup menu. In the adjust input menu, that we are looking at now, data
sourced from an NMEA input will be presented in the same way as XDi-net data.
11.5 XDi-net
– input adjust and special use
11.5.1
XDi-net adjust menu
– Prop RPM% set point 1
Variable data is stored in the XDi unit as absolute values in a predefined location in the CAM object index table.
Details can be found in the XDi-net/CANopen reference manual.
Data in XDi-net format is transmitted in a Multiplexed PDO (SAM-MPDO), automatically addressed to the right
predefined object index location, and received by the XDi as a data broadcast.
Using XDi-net format, data is shared on a CANopen network without the need for a CANopen master or any
complicated NodeID setup.
The device acting as a data source is just broadcasting XDi-net data, and any XDi indicator (receiver) is simply
listening for the broadcasted data they need.
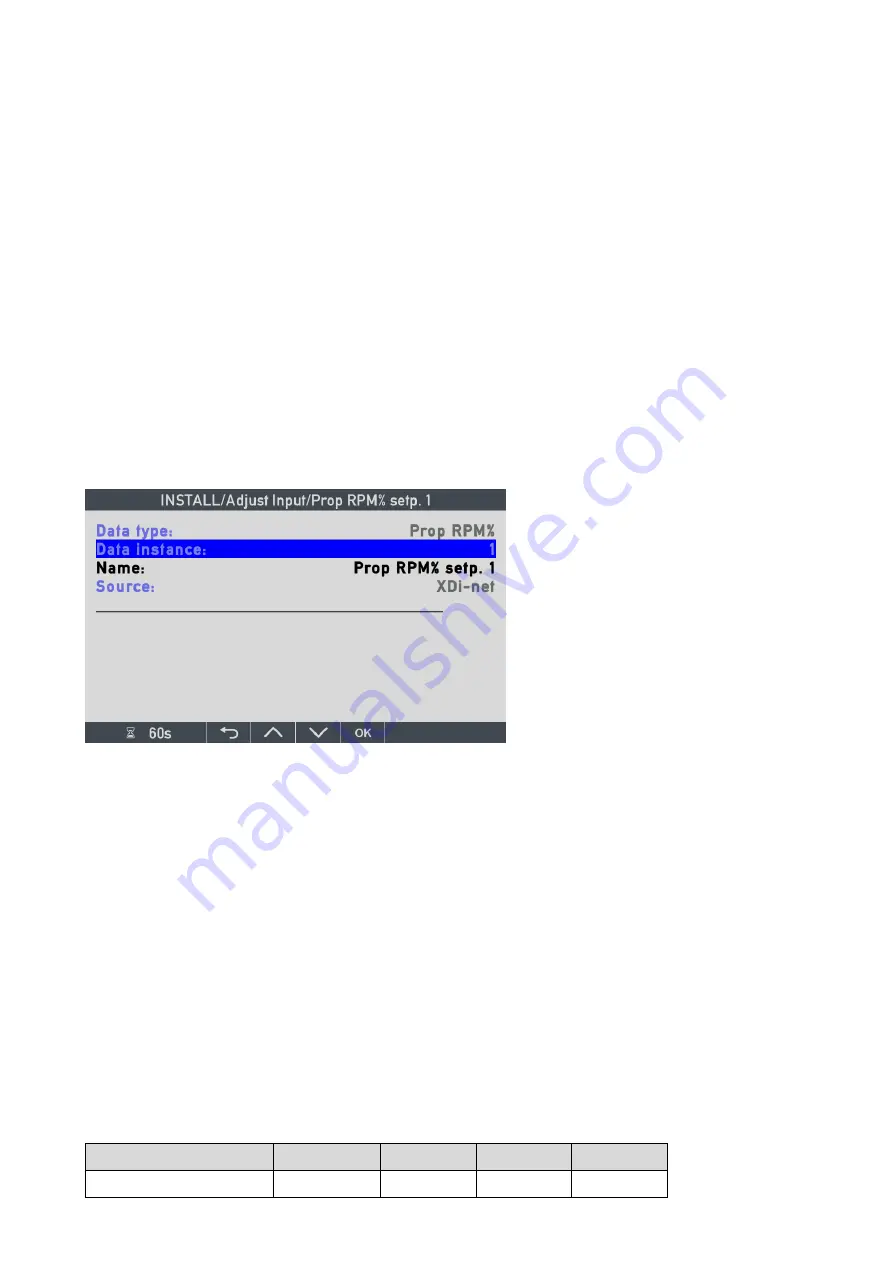
This means, that there are no parameters to set up via menu when XDi-net is used as input.
In this menu the only thing you can change is the name of the input source, in this case Prop RPM% setp. 1.
Note: In some virtual indicators (especially in XDi-N) we use the special input fall-back function, the name of the
active source is often presented on the indicator screen and in that case, it can be useful to be able to change the
source name to match a given installation.
11.5.1.1
Data from more than one data instance on the same CAN bus
When for example several azimuth thrusters are on the same CAN bus, each with one or more XDi indicators
connected, it requires a separate VS profile for each data instance that the indicator must support.
For example, if there are two azimuth thrusters on the same CAN bus, each with one or more XDi units for
indication, then the selected VI must have a separate VS profile for data instance 1 and another for data
instance 2. But often the CAN busser are physically separated, one CAN bus line for each thruster.
11.5.1.2
Special use of XDi-net as source
XDi-net is also used as input type if two different data types are generated based on the same input value.
This is for example the case when the following data inputs are used to generate 2 or more data types:
Input type
Data type 1
Data type 2 Data type 3 Data type 4
AX1 analogue input
RPM
% RPM
% Trust
% Power







































































