





























SRV-63 series AC servo drives Control mode applications
-42-
Symbol
Pin
no.
Name
Torque mode
MotionNet mode
Default
value
Mark
Function
name
Default
value
Mark
Function
name
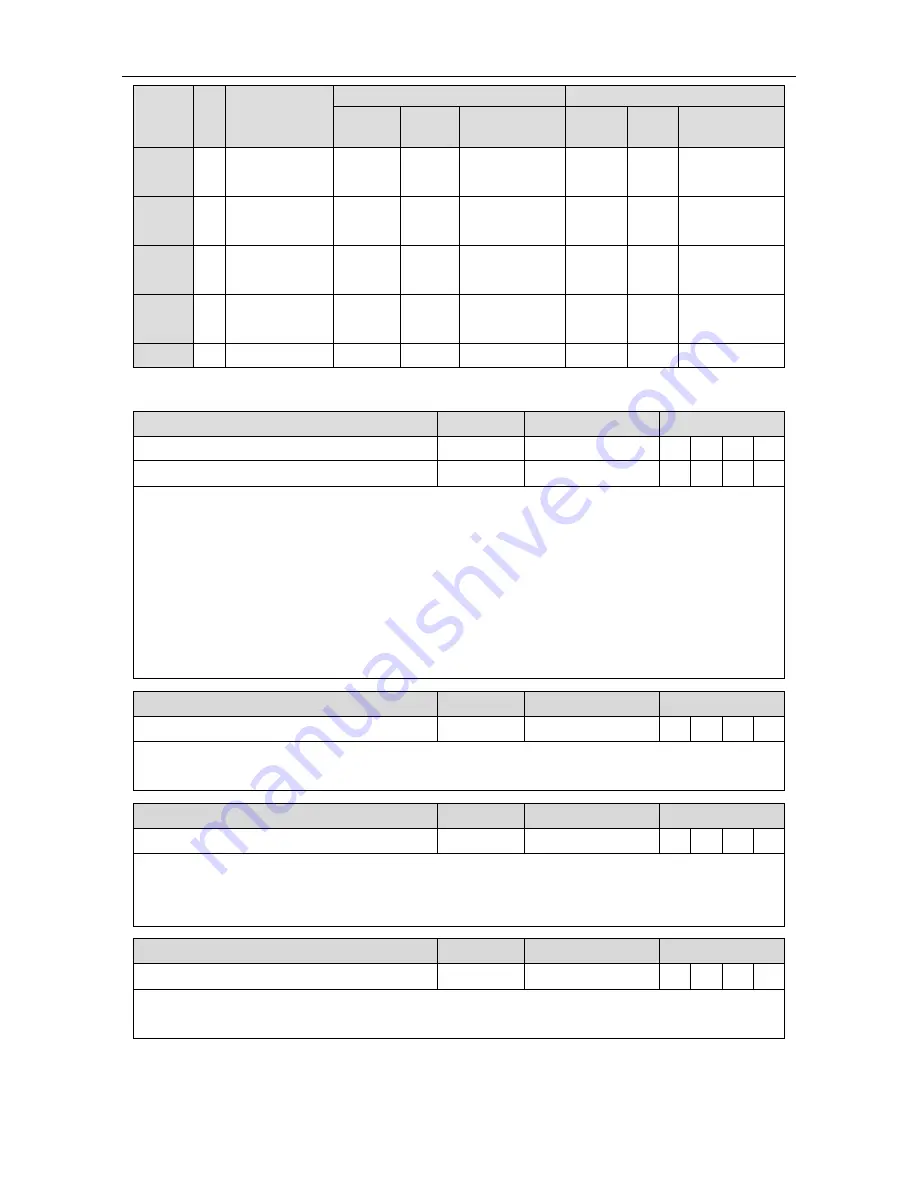
DO2
15 Digital output 2 0x003
ALM
Fault output
0x001
RDY
Servo ready
output
DO3
11 Digital output 3 0x010
TRCH
Torque
reaching
0x003
ALM
Fault output
DO4
29 Digital output 4 0x00D
ZSO
Speed zero
output
0x007
PLR
Positioning
finished
DO5
9 Digital output 5 0x005
BRK
External brake
release signal
0x00D
ZSO
Speed zero
output
DO6
13 Digital output 6 0x00E
LM
Torque limiting 0x00E
LM
Torque limiting
4.4.4.1 Function description of the digital input:
Signal name
Sign
Function number Available mode
Positive direction drive disabled
POT
0x01
P
S
T
F
Negative direction drive disabled
NOT
0x02
P
S
T
F
This function input is the drive prohibition against positive/negative direction. The concrete action
is related to the setting of P3.40 [travel limit switch setting]:
When P3.40 is set to 0 and positive direction input is disabled, the motor stops at the current
position, only negative direction command input can be accepted. If the negative direction drive
input is disabled, the motor stops at the current position, only positive direction command input
can be accepted.
P3.40 is 1, the function is invalid;
P3.40 is 2, and prohibition of positive/negative drive input is valid, the drive alarms.
Signal name
Sign
Function number Available mode
Servo enabling
SON
0x03
P
S
T
F
This function is the control signal of the servo enabling/disabling.
If it is valid, the drive will provide power to the motor; if invalid, the drive will cut off connection.
Signal name
Sign
Function number Available mode
Alarm clearing
CLA
0x04
P
S
T
F
This function is the control signal of alarm clearing when the drive alarms.
Some alarms cannot be cleared by this function. Please refer to chapter 10.4 for detailed
information.
Signal name
Sign
Function number Available mode
Control mode switching
MCH
0x05
P
S
T
This function is the control signal of mode switching when P0.03 is 3, 4 and 5.
When the control mode is 0, 1, 2, 6 and 7 the function input is invalid.







































































