





























SRV-63 series AC servo drives Detailed parameter description
-100-
P1.02
2
nd
inertia ratio
Setting range
Default
Unit
Available mode
0~10000
250
%
P
S
T
F
The definition is the same as P1.01.
Note:
The automatic online gain adjustment is invalid for this parameter.
P1.02
Data size
16bit
Data format
DEC
Modbus address
1204,1205
CANopen address
0x2102,0x00
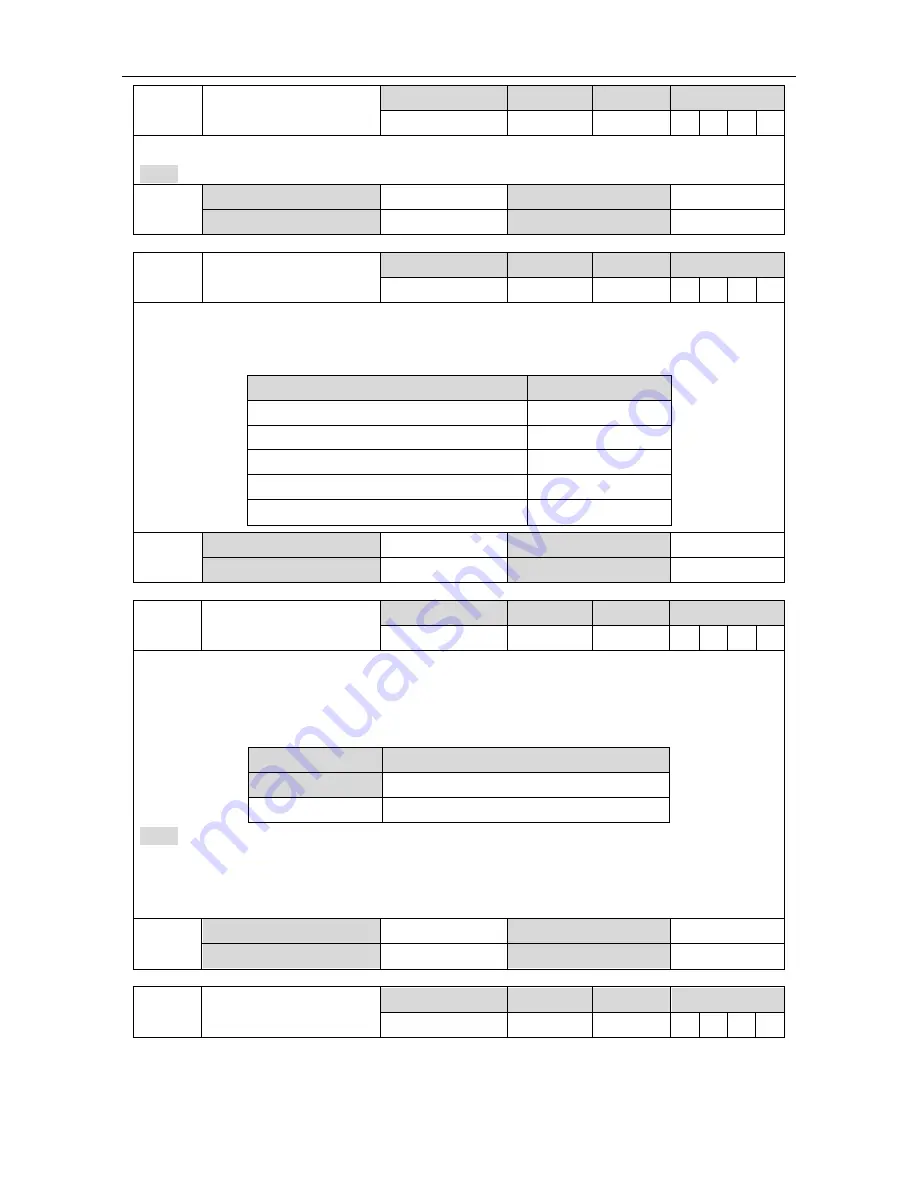
P1.03
Machine rigidity setting
Setting range
Default
Unit
Available mode
0~31
13
-
P
S
T
F
The bigger the value is the faster response and higher rigidity and easier vibration. In stable
system, higher rigidity setting makes fast response.
Mechanical structure
Rigidity set
Big handling, transmission equipment
0~13
Belt drive mechanism
5~16
Ball screw + Belt drive
5~16
Manipulator
15~22
Direct ball screw or rigid bodies
18~25
P1.03
Data size
16bit
Data format
DEC
Modbus address
1206,1207
CANopen address
0x2103,0x00
P1.04
Inertia offline automatic
estimation
Setting range
Default
Unit
Available mode
0~1
0
-
P
S
T
F
The load inertial ratio of motor rotation inertia can be gained by setting this parameter. After
setting the inertia identification, the motor will run 6 cycles to carry out the inertia identification. In
each cycle, the motor will run at the mode of P1.05, the maximum rotation cycles are determined
by P1.06 and the ACC command time is determined by P1.07.
Setting value
Function
[0]
Inertia identification switch off
1
Inertia identification switch on
Note:
1. The motor speed during identification will be faster if the value of P1.06 and P1.07 are bigger.
2. Refer to chapter 10.1 if the drive reports Er25-7.
3. This parameter is invalid in the servo enabling state.
P1.04*
Data size
16bit
Data format
DEC
Modbus address
1208,1209
CANopen address
0x2104,0x00
P1.05
Operation mode of
inertia identification
Setting range
Default
Unit
Available mode
0~3
0
-
P
S
T
F







































































