





























5 Installation and Commissioning
5.4 Robot Safety System Connections
66
Product Manual, Control Cabinet IRC5P
programmed path. After a category 1 stop (Delayed Stop), the robot can be re-
started and operation resumed after the cause for the emergency stop has been
removed. Stopping the robot by category 1 stop will cause the robot to stop
immediately using electrical power to brake and stop the motor speed and then
remove power and apply brakes after 2 seconds.
WARNING!
Emergency stop category 1 must not be used as a convenient substitute
for emergency stop category 0 where emergency stop directly involves people
getting in contact with the robot and conveyor operation.
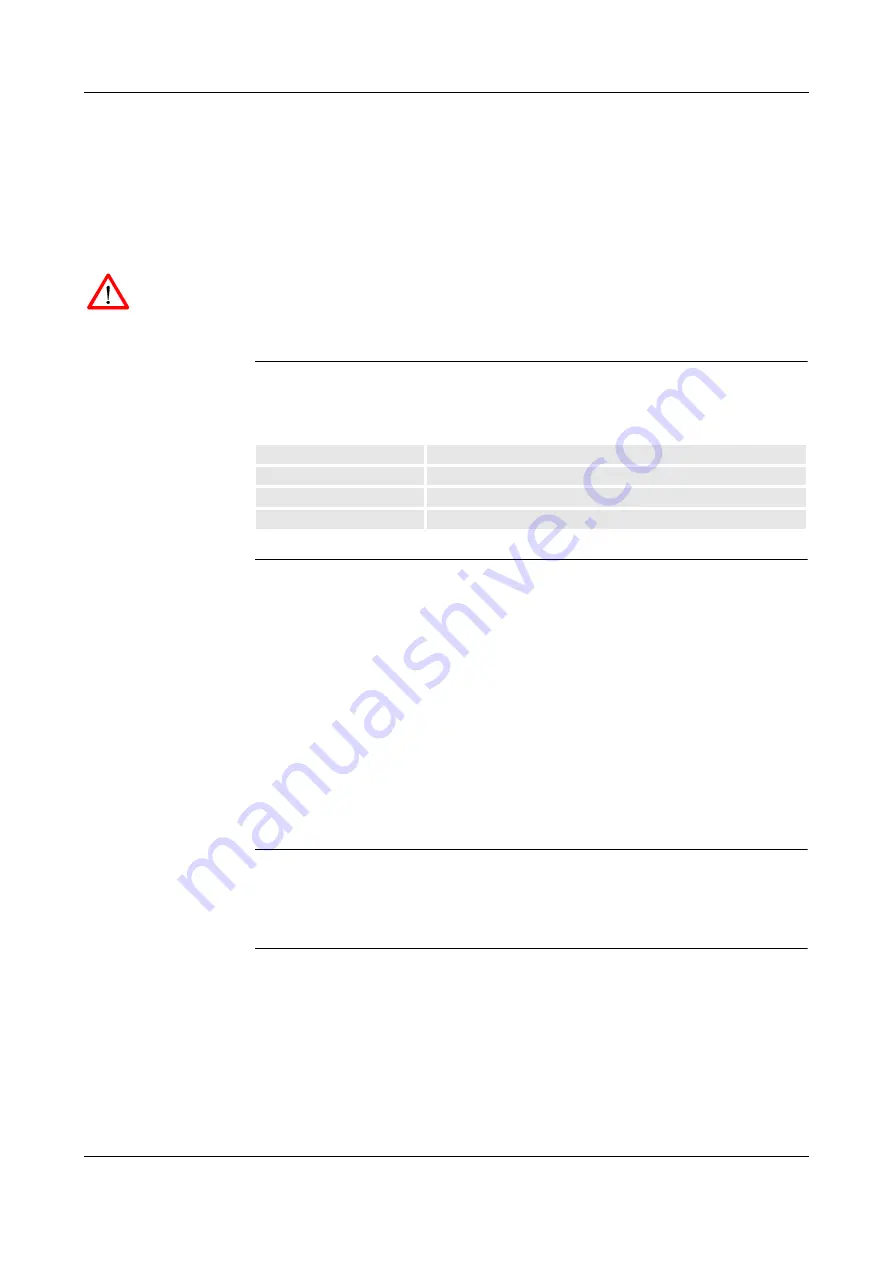
Stop Time
The time for the robot to stop after an emergency stop category 0 are as shown in the
table below. Note that the indicated times are dependent on the weight of the
application equipment mounted on the robot.
Switch Type
Connections for the emergency stop system in the robot emergency stop chain will
fulfil these requirements, provided that the correct types of switches are used. These
switches must be as follows:
•
Switches used for Emergency Stop, General Mode Stop and Auto Mode Stop
must be of positive opening contact type according EN IEC 60204-1 and
EN IEC 60947-5-1. Additionally installed External Emergency Stop switch(es)
must be of a type which will be locked after operated, and re-opened by pulling /
rotating the switch knob.
•
Any connections or use of switch types not complying with the description and
diagrams in this manual that will corrupt the function of the emergency stop
system will be the full responsibility of the user.
Dual Safety Chains
The emergency stop-, run-, motor-, enabling device- and process (cabin interlock)
chains operate in a dual chain system, Chain 1 and Chain 2. Both chains must be
activated in order to obtain robot motion state.
Chain Monitoring
The dual safety chains are monitored by software and hardware. If one of the chains
does not activate within a time T after the other chain is activated, an error will
occur. In this system, the time T is equal to 2 seconds.
Speed
Stop time
500 mm/s
80 ms
1000 mm/s
100 ms
1500 mm/s
120 ms
Содержание IRC5P
Страница 1: ...The heart of Robotics Product Manual Control Cabinet IRC5P 3HNA009834 001 en Rev 06 ...
Страница 2: ......
Страница 10: ...10 3HNA009834 001 en Rev 06 Product Manual Control Cabinet IRC5P ...
Страница 14: ...2 Safety 14 3HNA009834 001 en Rev 06 Product Manual Control Cabinet IRC5P ...
Страница 30: ...3 System Description 3 4 Pendant Description 30 3HNA009834 001 en Rev 06 Product Manual Control Cabinet IRC5P ...
Страница 218: ...218 3HNA009834 001 en Rev 06 Product Manual Control Cabinet IRC5P Manual Status ...