





























All BASIC commands
Section 4-2
198
4-2-159 MOVELINK
/i
Type
Axis command
Syntax
MOVELINK(distance, link_distance, link_acceleration,
link_deceleration, link_axis [ , link_option [ , link_position ]])
ML(distance, link_distance, link_acceleration, link_deceleration,
link_axis [ , link_option [ , link_position ]])
Description
The
MOVELINK
command creates a linear move on the base axis
linked via a software gearbox to the measured position of a link axis.
The link axis can move in either direction to drive the output motion.
The parameters show the distance the BASE axis moves for a certain
distance of the link axis (
link_distance
). The link axis distance is
divided into three phases that apply to the movement of the base axis.
These parts are the acceleration, the constant speed and the decelera-
tion. The link acceleration and deceleration distances are specified by
the
link_acceleration
and
link_deceleration
parameters. The con-
stant speed link distance is derived from the total link distance and
these two parameters.
The three phases can be divided into separate
MOVELINK
commands
or can be added up together into one.
Consider the following two rules when setting up the
MOVELINK
com-
mand.
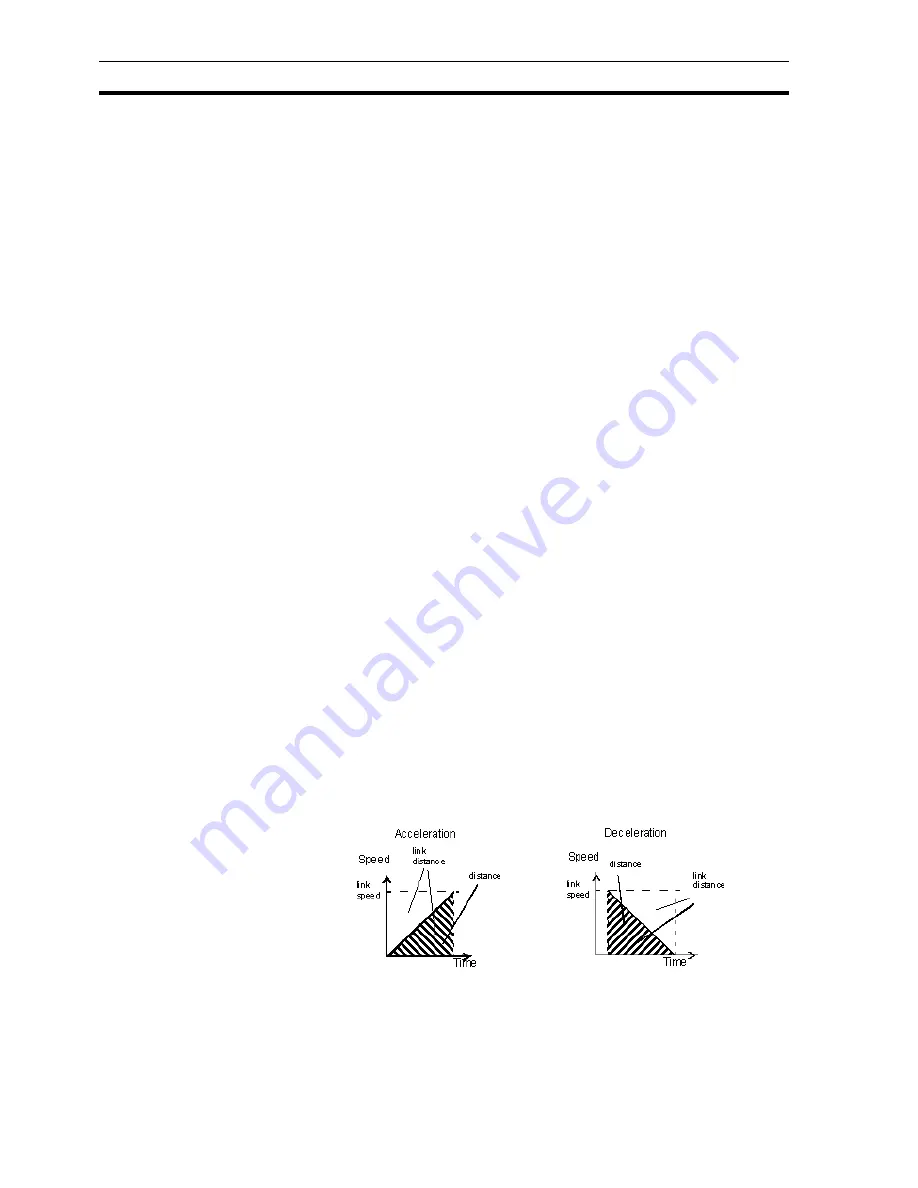
Rule 1: In an acceleration and deceleration phase with matching speed,
the
link_distance
must be twice the distance. See the figure.
Rule 2: In a constant speed phase with matching speeds, the two axes
travel the same distance so the distance to move must equal the
link_distance
.
MOVELINK
works on the default basis axis group (set with
BASE
)
unless
AXIS
is used to specify a temporary base axis. The axis set for
link_axis
drives the base axis.
MOVELINK
is designed for controlling movements such as:
•
Synchronization to conveyors
•
Flying shears
•
Thread chasing, tapping etc.
•
Coil winding
Note: If the sum of
link_acceleration
and
link_deceleration
is greater
than
link_distance
, they are both reduced in proportion in order to
equal the sum to
link_distance
.
Summary of Contents for SYSMAC CJ Series
Page 2: ......
Page 70: ...Specifications Section 2 4 58...
Page 84: ...FINS commands Section 3 4 72...
Page 148: ...All BASIC commands Section 4 2 136 AXIS 1 AXIS 0...
Page 370: ...Section 358...







































































