





























FX
3U
Series Programmable Controllers
User’s Manual - Hardware Edition
285
14 Test Operation, Adjustment, Maintenance and Troubleshooting
14.6 Judgment by Error Codes and Representation of Error Codes
11
Hi
gh
-Speed
Counters
12
O
utput W
iri
ng
13
W
iri
ng for
V
ari
ous
Us
es
14
Te
st R
un,
Mai
nten
ance,
T
roubl
es
hooti
ng
15
IInput/Output
Pow
ered
Exte
nsi
on U
nit
s
16
Input/O
utput
Extens
ion
Bl
ock
s
17
Extension
Power Suppl
y
Un
it
18
Other Extens
ion
Uni
ts an
d
Opti
ons
19
D
isplay M
od
ule
20
Te
rminal
Bl
oc
k
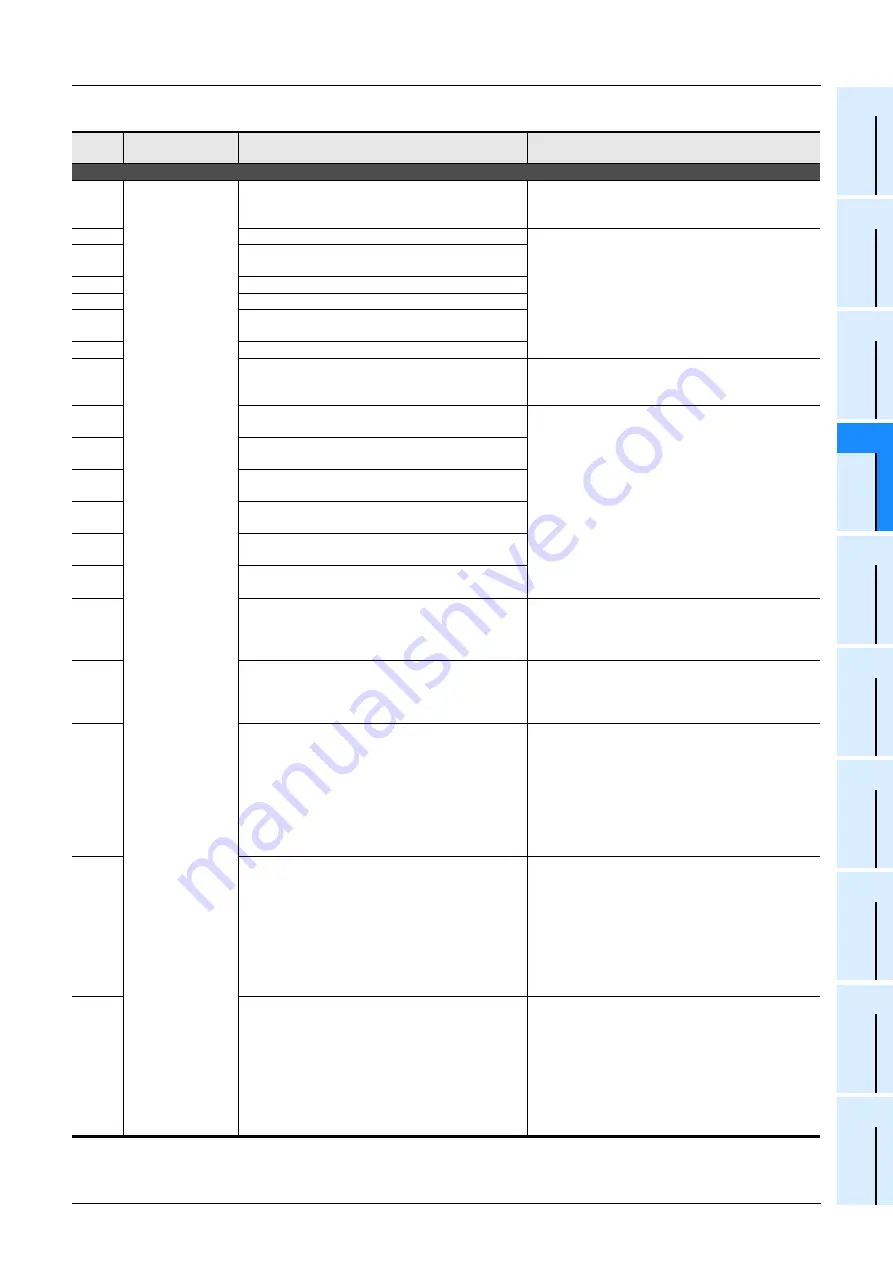
Operation error [M8067(D8067)]
6710
Continues
operation
Mismatch among parameters
This error occurs when the same device is used
within the source and destination in a shift
instruction, etc.
6730
Incorrect sampling time (T
S
) (T
S
≤
0)
<PID instruction is stopped.>
This error occurs in the parameter setting value or
operation data executing PID instruction.
Check the contents of the parameters.
6732
Incompatible input filter constant (
α
)
(
α
< 0 or 100
≤
α
)
6733
Incompatible proportional gain (K
P
) (K
P
< 0)
6734
Incompatible integral time (T
I
) (T
I
< 0)
6735
Incompatible derivative gain (K
D
)
(K
D
< 0 or 201
≤
K
D
)
6736
Incompatible derivative time (T
D
) (T
D
< 0)
6740
Sampling time (T
S
)
≤
Scan time
<Auto tuning is continued.>
The operation is continued in the condition
"sampling time (T
S
) = cyclic time (scan time)".
6742
Variation of measured value exceeds limit.
(
U
PV <
−
32768 or +32767 <
U
PV)
<PID operation is continued.>
The operation is continued with each parameter set
to the maximum or minimum value.
6743
Deviation exceeds limit.
(EV <
−
32768 or +32767 < EV)
6744
Integral result exceeds limit.
(Outside range from
−
32768 to +32767)
6745
Derivative value exceeds limit due to derivative gain
(K
D
).
6746
Derivative result exceeds limit.
(Outside range from
−
32768 to +32767)
6747
PID operation result exceeds limit.
(Outside range from
−
32768 to +32767)
6748
PID output upper limit set value < PID output lower
limit set value.
<Transpose of output upper limit value and output
lower limit value.
→
PID operation is continued.>
Check whether the target setting contents are
correct.
6749
Abnormal PID input variation alarm set value or
output variation alarm set value (Set value < 0)
<Alarm output is not given.
→
PID operation is
continued.>
Check whether the target setting contents are
correct.
6750
<Step response method>
Improper auto tuning result
<Auto tuning is finished.
→
PID operation is
started.>
• The deviation at start of auto tuning is 150 or
less.
• The deviation at end of auto tuning is 1/3 or
more of the deviation at start of auto tuning.
Check the measured value and target value, and
then execute auto tuning again.
6751
<Step response method>
Auto tuning operation direction mismatch
<Auto tuning is forcibly finished.
→
PID operation is
not started.>
The operation direction estimated from the
measured value at the start of auto tuning was
different from the actual operation direction of the
output during auto tuning.
Correct the relationship among the target value,
output value for auto tuning, and the measured
value, and then execute auto tuning again.
6752
<Step response method>
Improper auto tuning operation
<Auto tuning is finished.
→
PID operation is not
started.>
Because the set value was fluctuated during auto
tuning, auto tuning was not executed correctly.
Set the sampling time to a value larger than the
output change cycle, or set a larger value for the
input filter constant.
After changing the setting, execute auto tuning
again.
Error
code
PLC operation at
error occurrence
Contents of error
Action
Summary of Contents for FX2-16E series
Page 2: ......
Page 8: ... 6 Safety Precautions Read these precautions before use MEMO ...
Page 519: ......







































































