




























5 - 20
5. PARAMETERS
No. Symbol
Name and Function
Initial
Value
Unit
Setting
Range
PE28
For manufacturer setting
0000h
PE29
Do not change this value by any means.
0000h
PE30
0000h
PE31
0000h
PE32
0000h
PE33
0000h
PE34 **FBN2 Fully closed loop control feedback pulse electronic gear 2 numerator
Used to set the numerator of the electronic gear to the motor encoder pulse. Set the
electronic gear so that the number of pulses for one servo motor revolution is converted to
the resolution of the load side encoder.
When the set value is "0", it is identified as "1" inside.
1 0
to
32767
PE35 **FBD2 Fully closed loop control feedback pulse electronic gear 2 denominator
Used to set the denominator of the electronic gear to the motor encoder pulse. Set the
electronic gear so that the number of pulses for one servo motor revolution is converted to
the resolution of the load side encoder.
When the set value is "0", it is identified as "1" inside.
1 0
to
32767
PE36
For manufacturer setting
0.0
PE37
Do not change this value by any means.
0.00
PE38
0.00
PE39
0000h
PE40
0000h
Summary of Contents for MR-J3-B-RJ006
Page 15: ...A 14 MEMO ...
Page 19: ...4 MEMO ...
Page 65: ...2 18 2 SIGNALS AND WIRING MEMO ...
Page 119: ...4 22 4 OPERATION AND FUNCTIONS MEMO ...
Page 145: ...6 6 6 TROUBLESHOOTING MEMO ...
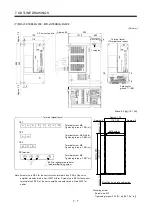
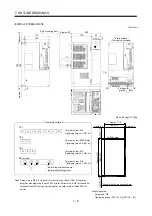
Page 155: ...7 10 7 OUTLINE DRAWINGS MEMO ...
Page 165: ...SH NA 030056 C ...







































































