
















4 - 15
4. OPERATION AND FUNCTIONS
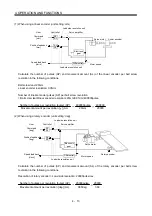
(b) Position difference error detection
Set "
2" in parameter No.PA03 to make the position deviation error detection valid.
Position difference error detection
2
Parameter No.PE03
Comparing the motor side feedback position (2)) and load side feedback position (4)), if the difference is
not less than the set value (1 to 20000kpulse) of parameter No.PE07 (fully closed loop control position
deviation error detection level), the function generates an alarm (fully closed loop control error detection
(42)) and stops. The initial value of parameter No.PE07 is 100kpulse. Change the set value as required.
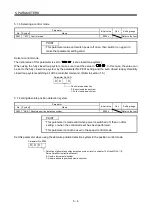
(c) Detecting multiple difference errors
When setting parameter No.PE03 as shown below, multiple difference errors can be detected. For the
error detection method, refer to (a) (b) in this section.
Parameter No.PE03
Set
value
Speed difference
error detection
Position difference
error detection
1
2
3
4.4.2 Auto tuning function
The auto tuning function is the same as that of the MR-J3- B servo amplifier.
For full information, refer to the MR-J3- B Servo Amplifier Instruction Manual.
4.4.3 Machine analyzer function
The machine analyzer function of the Servo Configuration software is the same as that of the MR-J3- B servo
amplifier.
For full information, refer to the MR-J3- B Servo Amplifier Instruction Manual.
This function is activated by the feedback of the motor encoder. It is irrelevant to the load side encoder.
Summary of Contents for MR-J3-B-RJ006
Page 15: ...A 14 MEMO ...
Page 19: ...4 MEMO ...
Page 65: ...2 18 2 SIGNALS AND WIRING MEMO ...
Page 119: ...4 22 4 OPERATION AND FUNCTIONS MEMO ...
Page 145: ...6 6 6 TROUBLESHOOTING MEMO ...
Page 155: ...7 10 7 OUTLINE DRAWINGS MEMO ...
Page 165: ...SH NA 030056 C ...