




























4 - 12
4. OPERATION AND FUNCTIONS
4.3 Operation from controller
The fully closed loop control compatible servo amplifier can be used with any of the following controllers.
Servo system controller
Model
Remarks
Motion controller
Q17 DCPU/
Q17 HCPU
Speed control (II) instructions (VVF and VVR) cannot
be used.
Positioning module
QD75MH
An absolute type linear scale is required to configure an absolute position system.
The battery (MR-J3BAT) need not be fitted to the servo amplifier.
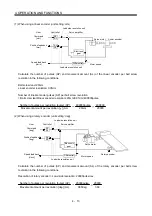
4.3.1 Operation from controller
Positioning operation from the controller is basically performed like the MR-J3- B servo amplifier.
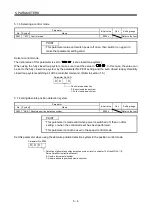
4.3.2 Servo system controller setting
When using fully closed loop system, make the following setting.
Set the other servo parameters and control parameters as in the MR-J3- B servo amplifier.
Parameter No.PA01, PC17, PC26, PC27, PE01, PE03 to PE05, PE34 and PE35 are written to the servo
amplifier and then are enabled using any of the methods indicated by in Parameter valid conditions.
Parameter No.PE06 to PE08 are enabled at setting regardless of the valid conditions.
Parameter valid conditions
Settings
Motion
controller
Positioning
module
Setting item
Controller
reset
Power
OFF ON Q17 DCPU/
Q17 HCPU
QD75MH
Command resolution
Load side encoder
resolution unit
MR-J3- B-RJ006 Fully closed loop servo amplifier setting
MR-J3-B fully closed loop
Motor setting
Automatic setting
Serial encoder cable selection
(parameter No.PC26, PC27)
Home position setting condition selection
(parameter No.PC17)
Fully closed loop selection (parameter No.PA01, PE01)
Fully closed loop selection 2 (parameter No.PE03)
Fully closed loop control error detection speed difference
error detection level
(parameter No.PE06)
Fully closed loop control error detection position
difference error detection level
(parameter No.PE07)
Valid at setting regardless of
the valid conditions
Fully closed loop electronic gear numerator
(parameter No.PE04, PE34)
Fully closed loop electronic gear denominator
(parameter No.PE05, PE35)
Servo
parameters
Fully closed dual feedback filter (parameter No.PE08)
Valid at setting regardless of
the valid conditions
Set the items as required.
Unit setting
mm/inch/degree/pulse
Positioning
control
parameters
Number of pulses per revolution (AP)
Movement amount per revolution (AL)
For the setting methods, refer to (1) (2) in this section.
Summary of Contents for MR-J3-B-RJ006
Page 15: ...A 14 MEMO ...
Page 19: ...4 MEMO ...
Page 65: ...2 18 2 SIGNALS AND WIRING MEMO ...
Page 119: ...4 22 4 OPERATION AND FUNCTIONS MEMO ...
Page 145: ...6 6 6 TROUBLESHOOTING MEMO ...
Page 155: ...7 10 7 OUTLINE DRAWINGS MEMO ...
Page 165: ...SH NA 030056 C ...







































































