




























4 - 18
4. OPERATION AND FUNCTIONS
Name Explanation
Unit
Peak load ratio
The maximum occurrence torque is displayed.
The maximum value for the past 15 seconds is displayed considering a rated
torque as 100%.
%
Instantaneous occurrence torque
The instantaneous occurrence torque is displayed.
The value of torque being occurred is displayed in real time considering a
rated torque as 100%.
%
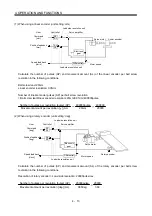
Position in motor side 1-revolution
The position in servo motor side 1-revolution is displayed in the encoder pulse
unit.
When the value exceeds the maximum number of pulses, it resets to 0.
When the servo motor rotates in the CCW direction, the value is added.
pulse
Motor side absolute position counter
The movement amount from the home position (0) is displayed as multi-
revolution counter value of the absolution position encoder in the absolution
position encoder system.
rev
Load inertia moment ratio
The estimated value of the servo motor shaft conversion load inertia moment
ratio to the servo motor inertia moment is displayed.
Multi-
plier
( 1)
Bus voltage
The voltage (across P( )-N( )) of main circuit converter is displayed.
V
Load side cumulative feedback pulses
Feedback pulses from the load side encoder are counted and displayed.
When the set value exceeds 999999999, it starts with 0.
Click "Clear" to reset the value to 0.
The " – " symbol is indicated for reverse.
pulse
Load side droop pulses
Droop pulses of the difference counter between a load side position and a
command are displayed.
The " – " symbol is indicated for reverse.
pulse
Load side encoder information 1
The position in load side encoder 1-revolution is displayed.
For an incremental linear scale, the Z-phase counter is displayed. The value
is counted up from 0 based on the home position (reference mark). It is
displayed in load side encoder pulse unit.
For an absolute position linear scale, the encoder absolute position is
displayed.
pulse
Load side encoder information 2
Multi-revolution counter of the load side encoder is displayed. (for using a
rotary encoder)
rev
Motor side cumulative feedback pulses
(before gear)
Feedback pulses from the servo motor encoder are counted and displayed.
(Motor encoder unit)
When the set value exceeds 999999999, it starts with 0.
Click "Clear" to reset the value to 0.
The " – " symbol is indicated for reverse.
pulse
Summary of Contents for MR-J3-B-RJ006
Page 15: ...A 14 MEMO ...
Page 19: ...4 MEMO ...
Page 65: ...2 18 2 SIGNALS AND WIRING MEMO ...
Page 119: ...4 22 4 OPERATION AND FUNCTIONS MEMO ...
Page 145: ...6 6 6 TROUBLESHOOTING MEMO ...
Page 155: ...7 10 7 OUTLINE DRAWINGS MEMO ...
Page 165: ...SH NA 030056 C ...







































































