




























4 - 21
4. OPERATION AND FUNCTIONS
Symbol Name
Explanation
Unit
p) Parameter
(fully
closed
loop
selection)
The parameter for the fully closed loop control is displayed/set.
Click "Details" button to display the "Parameter – Fully closed selection"
window.
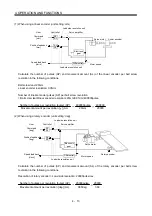
1) Fully closed loop function (Parameter No.PE01)
Select "Always valid" or "Semi/Fully closed loop change" for the fully
closed loop control function.
2) Load side encoder polarity (Parameter No.PC27)
Select " + (encoder pulse increasing direction in the servo motor CCW)" or
" - (encoder pulse decreasing direction in the servo motor CCW) for the
encoder pulse count polarity.
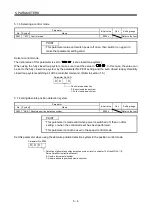
3) Control error detection method (Parameter No.PE03)
Select "Invalid", "Speed (speed deviation error detection)", "Position
(position deviation error detection)" or "Position/Speed (speed deviation
error/position deviation error) for the fully closed loop control error
detection function.
4) Position deviation error detection system (Parameter No.PE03)
Select "Standard (always position difference detection system)" or "Slip
detection (stopping position difference detection system)" for a detection
condition regarding the fully closed loop control error and the position
difference error of the detection function.
5) Speed deviation error detection (Parameter No.PE06)
Set the speed deviation error detection level to be used in the fully closed
loop control error detection function.
6) Position deviation error detection (Parameter No.PE07)
Set the position deviation error detection level to be used in the fully
closed loop control error detection function.
For details of each parameter, refer to section 5.3.2 and 5.5.2.
Click "Settings" to set the functions.
Click "Close" to close the window.
Summary of Contents for MR-J3-B-RJ006
Page 15: ...A 14 MEMO ...
Page 19: ...4 MEMO ...
Page 65: ...2 18 2 SIGNALS AND WIRING MEMO ...
Page 119: ...4 22 4 OPERATION AND FUNCTIONS MEMO ...
Page 145: ...6 6 6 TROUBLESHOOTING MEMO ...
Page 155: ...7 10 7 OUTLINE DRAWINGS MEMO ...
Page 165: ...SH NA 030056 C ...







































































