





























6 FUNCTIONAL SAFETY
6.4 Safety sub-function
375
6
SBC function
• Use SBCS (SBC output) for electromagnetic brake operation. It is not necessary to use MBR
(electromagnetic brake interlock).
Outline
This function outputs signals for controlling the external brake.
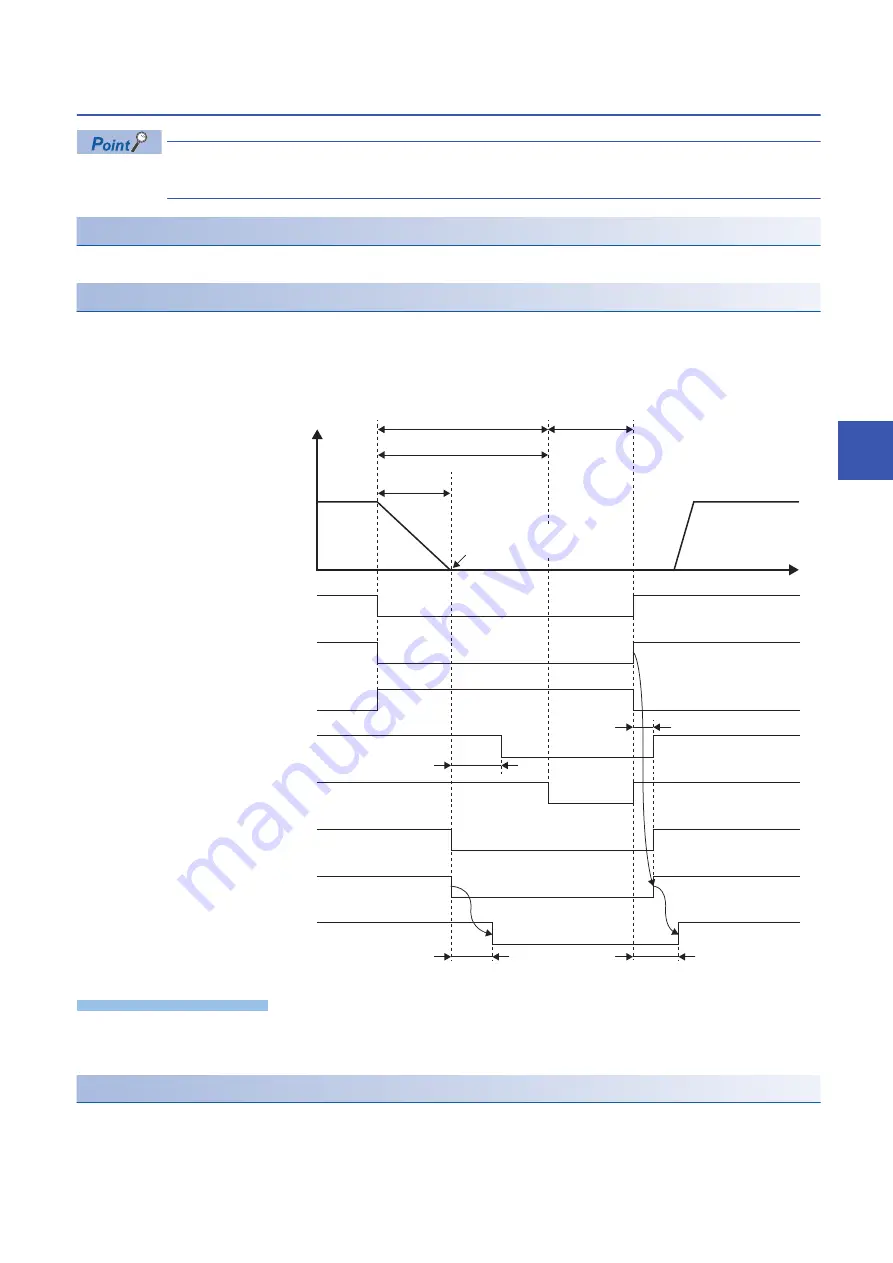
Operation sequence
The following shows the operation sequence while SS1 is being activated and when returning from the STO state. The
electromagnetic brake is activated when SBCS (SBC output) is off. By properly setting [Pr. PC02 Electromagnetic brake
sequence output] and [Pr. PSA03 SS1/SS2 deceleration monitor time], the electromagnetic brake can be activated without
dropping the vertical axis. The vertical axis freefall prevention function can also be used.
Precautions
When the power is shut off by the STO function, the dynamic brake stops from activation of the STO function until activation of
the electromagnetic brake. Be aware that if the axis is a vertical axis, it may drop.
Setting functional safety parameters
Refer to the following to set the functional safety parameters.
Page 340 Functional safety parameters that must be set
ON
OFF
ON
OFF
ON
OFF
ON
95 ms
0 r/min
(mm/s)
WNG
MBR
Servo motor speed
SS1 command
ON (disabled)
OFF (enabled)
Servo-on command
Base circuit
(energy supply to
servo motor)
STO output
OFF (shut-off)
ON (disabled)
OFF (enabled)
SBC output
ON (disabled)
OFF (enabled)
Electromagnetic brake
Electromagnetic brake
open delay time
Electromagnetic brake
operation delay time
Base circuit shut-off delay time
Operation
Deceleration
stop
SS1 deceleration monitor time
STO state
SS1 in progress
Open
Model speed command = 0
and speed is equal to or less
than zero speed







































































