





























28
2 CONTROL MODE
2.1 Control mode [G] [WG]
Controlword/Statusword
By changing [Controlword (Obj. 6040h)], control commands can be given to the servo amplifier. The control status can also be
checked with [Statusword (Obj. 6041h)].
Some bits of [Controlword (Obj. 6040h)] and [Statusword (Obj. 6041h)] vary or are common depending on the control mode.
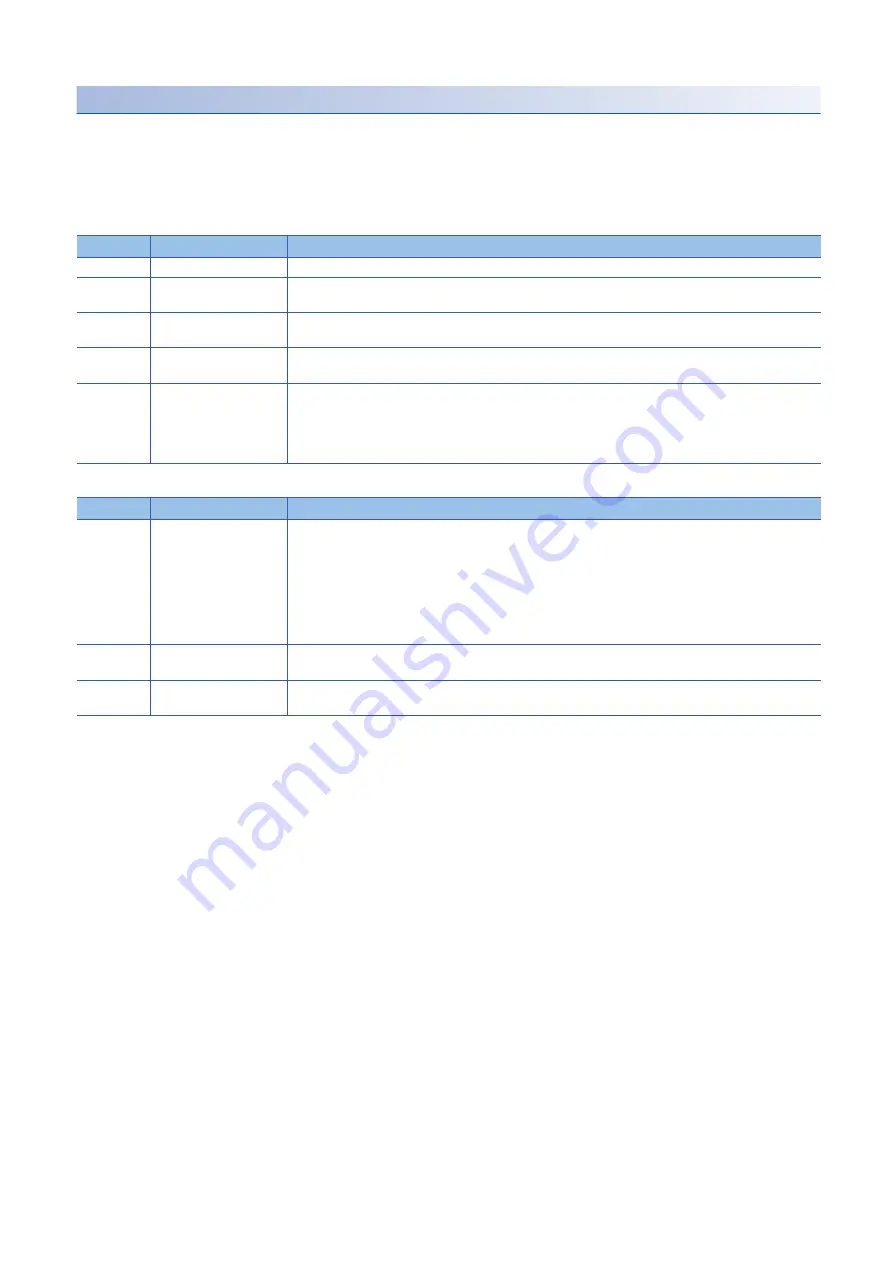
The bits that vary depending on the control mode are listed in the following tables.
■
Controlword OMS Bit (pp)
■
Statusword OMS Bit (pp)
Bit
Symbol
Description
4
New set-point
Obtains a new positioning servo parameter at bit rising.
5
Change set immediately
0: Set of set-points
1: Single set-point
6
abs/rel
0: Absolute position command
1: Relative position command
8
HALT
0: Drives the servo motor.
1: Stops the servo motor according to [Halt option code (Obj. 605Dh)].
9
Change on set-point
Enabled only in Set of set-points (when the bit 5 of [Obj. 6040h: 00h] is "0").
0: Shifts to the next positioning after completing the current positioning.
1: Shifts to the next positioning after performing positioning up to the current set-point with the setting of [profile
velocity (Obj. 6081h)].
Bit
Symbol
Description
10
Target reached
0: Halt (Bit 8) = 0: Target position not reached.
0: Halt (Bit 8) = 1: Axis decelerates.
1: Halt (Bit 8) = 0: Target position reached.
1: Halt (Bit 8) = 1: Velocity of axis is 0.
Judgment condition of Target position reached:
When the time set in [Position window time (Obj. 6068h)] elapses in a state where the difference between the
values in [Position actual value (Obj. 6064h)] and [Target position (Obj. 607Ah)] is equal to or below the value set
in [Position window (Obj. 6067h)], the state becomes "Target position reached".
12
Set-point acknowledge
0: Positioning completed (waiting for next command)
1: Positioning in progress (possible to overwrite a setpoint)
13
Following error
0: No following error
1: Following error







































































