





























M800/M80/E80 Series Maintenance Manual
4 Failure Diagnosis
97
IB-1501273-F
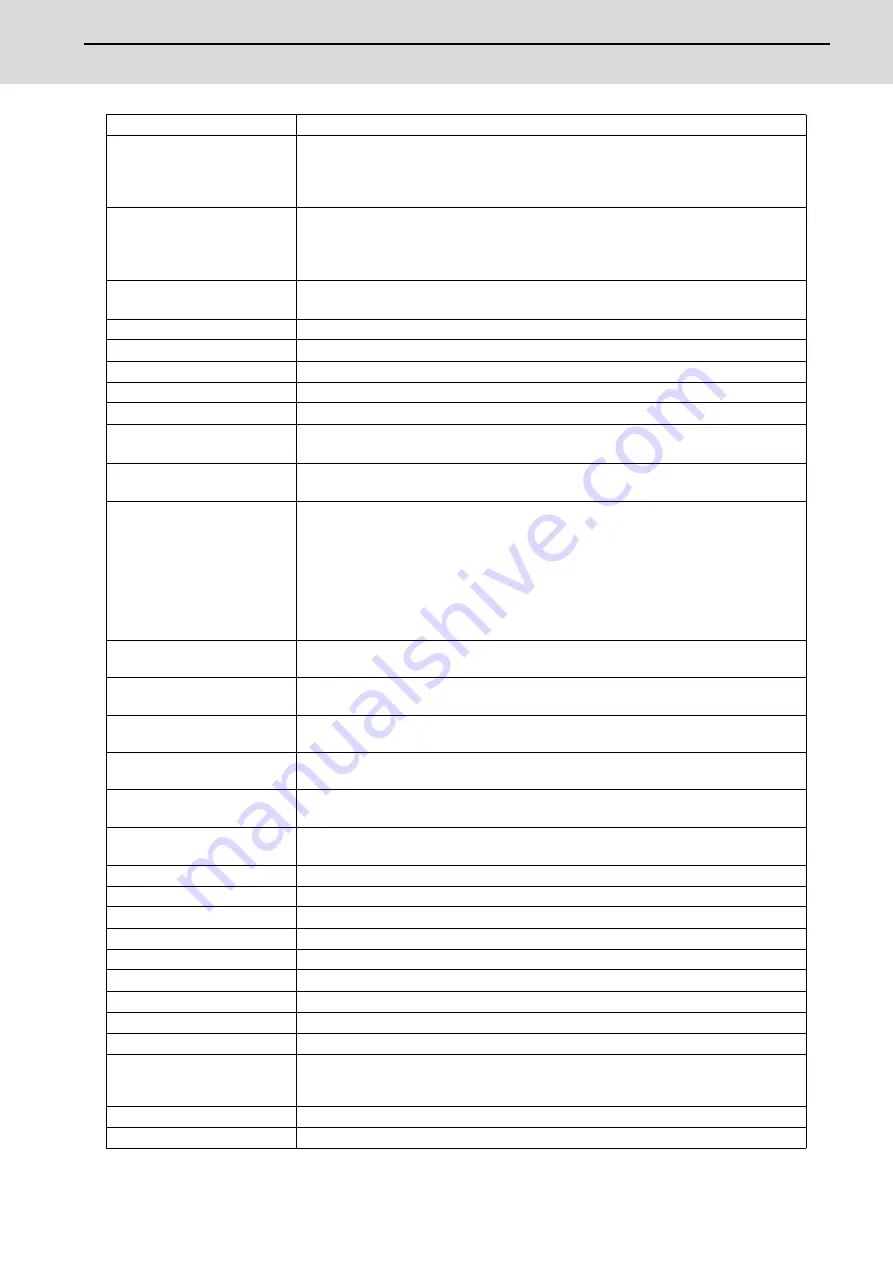
Control output
2L
This indicates the control signal output from servo to NC. (bit0 to bit7)
Bit0: Z-phase passed
Bit3: In zero speed
Bit7: In external emergency stop
Control output
2H
This indicates the control signal output from servo to NC. (bit8 to bitF)
Bit9: In speed monitor
BitA: In door closed (controller)
BitB: In door closed (self drive unit)
Control output
3L
This indicates the control signal output from servo to NC. (bit0 to bit7)
Bit0: In control axis detachment
Control output
3H
This indicates the control signal output from servo to NC. (bit8 to bitF)
Control output
4L
This indicates the control signal output from servo to NC. (bit0 to bit7)
Control output
4H
This indicates the control signal output from servo to NC. (bit8 to bitF)
Control output
5L
This indicates the control signal output from servo to NC. (bit0 to bit7)
Control output
5H
This indicates the control signal output from servo to NC. (bit8 to bitF)
Control output
6L
This indicates the control signal output from servo to NC. (bit0 to bit7)
Bit0: In OMR-FF control
Control output
6H
This indicates the control signal output from servo to NC. (bit8 to bitF)
Bit8: In drivers communication control
Detection system
This displays the detector type symbol of the absolute position detection system.
ES: Semi-closed encoder
EC: Ball screw end encoder
LS: Linear scale
MP: MP scale
ESS: Semi-closed high-speed serial encoder
ECS: Ball screw end high-speed serial encoder
INC: Incremental
Power OFF posn
This displays the coordinate at NC power OFF in the basic machine coordinate sys-
tem. (Command unit)
Power ON posn
This displays the coordinate at NC power ON in the basic machine coordinate system.
(Command unit)
Current posn
This displays the current coordinate in the basic machine coordinate system. (Com-
mand unit)
R0
This displays the multi-rotation counter value of the detector stored in the memory
during basic point setting.
P0
This displays the position within one rotation of the detector stored in the memory
during basic point setting.
E0
This displays the absolute position error stored in the memory during basic point set-
ting.
Rn
This displays the multi-rotation counter value of the current detector.
Pn
This displays the position within one rotation of the detector.
En
This displays the absolute position error during NC power OFF.
ABS0
This displays the absolute position reference counter.
ABSn
This displays the current absolute position.
MPOS
This displays the offset amount of the MP scale when the power is turned ON.
Unit type
This displays the servo driver type.
Unit serial No.
This displays the servo driver serial No.
Software version
This displays the servo side software version.
Control method
SEMI: Semi-closed loop
CLOSED: Closed loop
DUAL: Dual feedback
Motor end detector
This displays the motor end detector type.
Motor end detect No.
This displays the motor end detector serial No.
Display items
Details
Summary of Contents for E80 Series
Page 1: ......
Page 7: ......
Page 17: ......
Page 19: ......
Page 21: ......
Page 23: ......
Page 25: ......
Page 28: ...1 1 IB 1501273 F System Basic Configuration ...
Page 68: ...2 41 IB 1501273 F Daily Maintenance and Periodic Maintenance ...
Page 78: ...3 51 IB 1501273 F Maintenance of the Drive Unit ...
Page 101: ...M800 M80 E80 Series Maintenance Manual 3 Maintenance of the Drive Unit 74 IB 1501273 F ...
Page 102: ...4 75 IB 1501273 F Failure Diagnosis ...
Page 165: ...M800 M80 E80 Series Maintenance Manual 4 Failure Diagnosis 138 IB 1501273 F ...
Page 166: ...5 139 IB 1501273 F Troubleshooting ...
Page 169: ...M800 M80 E80 Series Maintenance Manual 5 Troubleshooting 142 IB 1501273 F ...
Page 170: ...6 143 IB 1501273 F Replacing Each Unit ...
Page 205: ...M800 M80 E80 Series Maintenance Manual 6 Replacing Each Unit 178 IB 1501273 F ...
Page 212: ......







































































