

















Z Shaft Encoder
Introduction
The ability to place stitches precisely at high speed is dependent on the accurate
operation of the electronics and electromechanical assemblies. The "key" to this is
the Z encoder. The information provided to the CPU and other electronics by the Z
encoder is the basis for all the embroidery head activity.
The Z Encoder is a two channel quadrature output with index pulse. If you send the
output to an oscilloscope you will see two square wave signals, one slightly ahead
of the other. You will also see a third signal, the index pulse. The CPU interprets
these signals to determine position, speed, and head up.
The CPU uses this information to determine when to move the beam, when to stop
the head for a color change, when setting home position is allowed, how fast the
head is running, how many stitches have been embroidered, etc.
It is important to understand that the peripheral operational software handles the
motor control circuitry differently when the Z axis is running than it does when the
Z axis is stopped. When running, the motor control circuitry allows the X,Y, and Z
axis motors only minute errors in rotation. Any error greater than the allowed error
will cause the motor to be driven to eliminate the error. When the peripheral is
stopped however, the software that controls the Z motor allows a larger "window"
of error. The purpose of this window is to keep the motors from oscillating around
the null, hunting for absolute position.
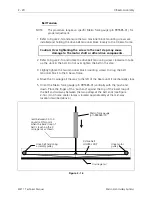
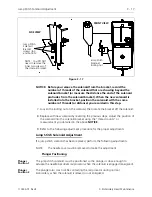
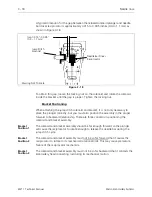
The green LED marked ZINDEX on the front of the peripheral (see Figure 3-4) can be
used to see if the CPU is in fact receiving a head up (or mark) pulse from the
encoder. (This indicates that the encoder and associated cables are functional.) It
should be noted however, that the ZINDEX (or "headup") LED does NOT have to be
lit when the peripheral is stopped, and the LED CANNOT be used to make a
determination of the Z encoder alignment status." If used in conjunction with the
proper headup tool, the LED can be used to see if the head up pulse is triggering
early or late as compared to absolute mechanical headup.
The procedures in the following pages will result in the most proper and accurate
alignment and repair of the Z encoder system that is possible and/or feasible in the
field by a technician.
It can be seen that the proper alignment of the Z encoder can result in maintaining
embroidery quality and proper machine operation. Slight Z encoder misalignment
can cause many kinds of erratic operation and/or intermittent thread breaks. A
larger misalignment can be the cause of equipment damage and subsequent
electronic or mechanical failures. The careful application of the Z encoder
procedures by a factory trained technician will result in a machine that will operate
correctly and reliably.
3 - 4
Z Shaft Encoder
EMT 1 Technical Manual
Melco Embroidery Systems







































































