





























5-28
(P
To
= 0). Sin
base poi
(Point B)
oint A)
set the
nput being at 1 V, set the bias to 0% (F18
c
(full scale), set the bias
n
reference frequency to 0 Hz for an analog i
e 1 V is the bias base point and it is equal to 10% of 10 V
t to 10% (C50 = 10).
To make the maximum frequency equal to the reference frequency for an analog input being
at 5 V, set the gain to 100% (C32 = 100). Since 5 V is the gain base point and it is equal to 50%
of 10 V (full scale), set the gain base point to 50% (C34 = 50).
The setting procedure for specifying a gain or bias alone without changing any
base points is the same as that of Fuji conventional inverters of
FRENIC5000G11S/P11S series, FVR-E11S series, etc.
F20
H95
to F22
DC Braking 1 (Braking starting frequency, Braking level, and Braking time)
DC Braking (Braking response mode)
F20 thro
deceler e-t
peration.
If the mo
decreasing
braking by f
king time (F22) when the
output frequency reaches the DC braking starting frequency (F20).
Setting the braking time to "0.0" (F22 = 0) disables the DC braking.
Braking starting frequency (F20)
F20 specifies the frequency at which the DC braking starts its operation during motor
decelerate-to-stop state.
Braking level (F21)
F21 specifies the output current level to be applied when the DC braking is activated. The
function code data should be set, assuming the rated output current of the inverter as 100%, in
increments of 1%.
Braking time (F22)
F22 specifies the braking period that activates DC braking.
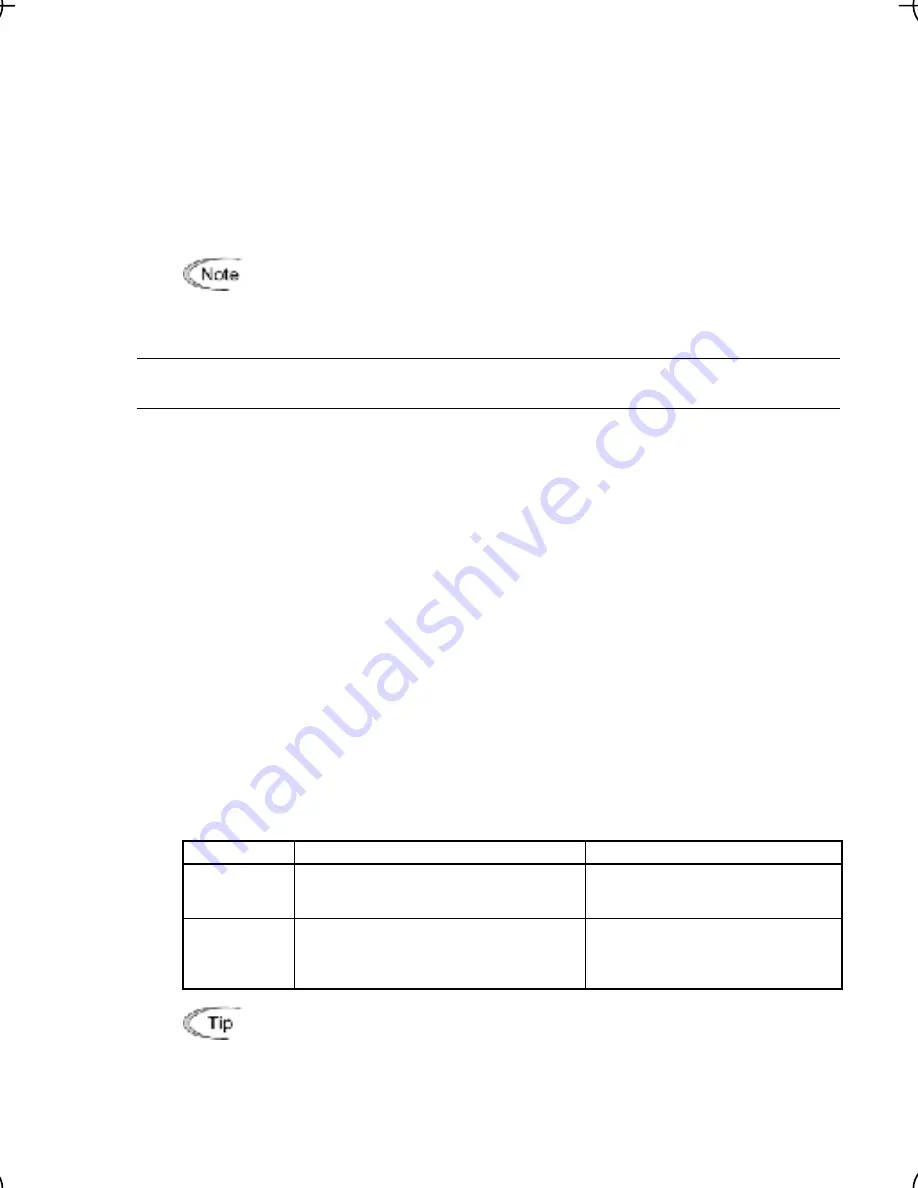
H95 speci
Data for H95
Characteristics
Note
ugh F22 specify the DC braking that prevents motor 1 from running by inertia during
o-stop o
at
tor enters a decelerate-to-stop operation by turning off the run command or by
the reference frequency below the stop frequency, the inverter activates the DC
lowing a current at the braking level (F21) during the bra
Braking response mode (H95)
fies the DC braking response mode.
0
Slow response. Slows the rising edge of
the current, thereby preventing reverse
rotation at the start of DC braking.
Insufficient braking torque may
result at the start of DC braking.
1
Quick response. Quickens the rising
edge of the current, thereby accelerating
the build-up of the braking torque.
Reverse rotation may result
depending on the moment of
inertia of the mechanical load and
the coupling mechanism.
It is also possible to use an external digital input signal as an "Enable DC braking"
terminal command
DCBRK
.
As long as the
DCBRK
command is ON, the inverter performs DC braking,
regardless of the braking time specified by F22.
Turning the
DCBRK
command ON even when the inverter is in a stopped state
activates DC braking. This feature allows the motor to be excited before starting,
resulting in smoother acceleration (quicker build-up of acceleration torque).
Summary of Contents for FRENIC-Multi series
Page 194: ...MEMO MEMO...







































































