





























ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
Chapter E: Appendixes
Operation & Software Manual
Direct Drives & Systems
279
DSC
2P and
DSC2V p
aramet
ers
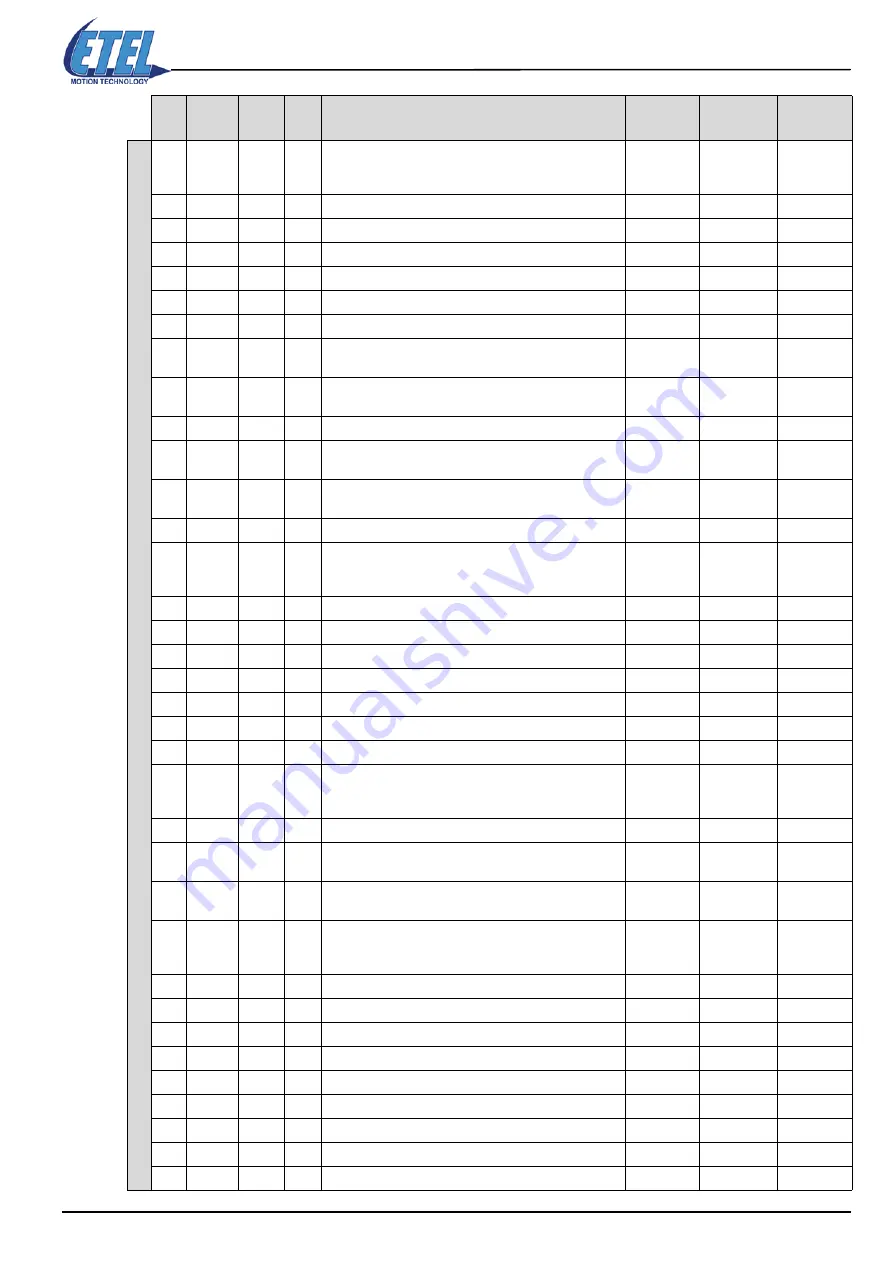
38
Homing on single index after having found mechanical
end stop with defined stroke (K46). If no index has been
met, the controller generates an error (M64=62)
K41
Homing speed
2000000
1
2147483647
K42
Homing acceleration
1000000
256
2147483647
K43
Homing tracking limit for mechanical end stop detection
10000000
0
2147483647
K44
Homing force limit for mechanical end stop detection
4096
0
32767
K45
Offset on absolute position
0
-2147483648 2147483647
K46
Stroke for K40 = 20, 21, 24, 25 homing mode
0
0
2147483647
K47
Movement to go out of a limit switch or mechanical end
stop at the end of the homing
0
0
2147483647
K48
Movement to go out of an index or home switch if the
motor is on the top of it when starting the homing
0
0
2147483647
K50
Set point calculator shift value: 1dpi = 2^K50 * 1upi
0
0
8
K52
Enables fine phase adjustment (takes K53 into account)
after homing
0
0
1
K53
Motor commutation phase adjustment after homing (is
taken into account only if K52=1)
0
0
2048
K54
Pairs of pole of the motor (=1 for linear motor)
1
1
2147483647
K55
Motor commutation encoder: number of dpi per
revolution for rotary motor or number of dpi per magnetic
period for linear motor
0
0
2147483647
K56
Motor commutation phase inversion enabled
0
0
1
K58
Limit switch mode
0
0
2
K58
0
Limit switch mode DIN9 and DIN10
1
Limit switch mode L1/L2
2
Limit switch mode L/H
K60
Theoretical software force/torque limit (regulator output)
20000
0
31000
K61
Reference mode
1
0
39
0
Force/torque reference mode. The reference value is
defined by K220 to K224 (32767 is equivalent to the
current defined by M82)
1
Standard position profile mode
3
Controller controlled by a speed reference defined by
K220 to K224
4
Controller controlled by a position reference defined by
K220 to K224
36
Controller controlled by a position reference defined by
K220 to K224. After a power on, it takes into account the
actual motor position as reference
K66
Display mode
1
1
64
1
Displays normal informations
2
Displays temperature of the controller
4
Displays analog encoder amplitude and index position
8
Displays sequence line number
16
Displays optional board message
32
Displays DC power voltage (Vpower) [V]
K68
Inverts positive/negative way
0
0
7
1
0
Inverts analog 1Vptp encoder
K
Alias
Val
<P1>
Bit #
<P1>
Comment for parameters K
and <P1> of the DSC2P and DSC2V
Def. Val
<P1>
Min. Val
<P1>
Max. Val
<P1>







































































