





























Operation & Software Manual
322
Direct Drives & Systems
Chapter E: Appendixes
ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
DSCDP mo
nit
o
ring
s
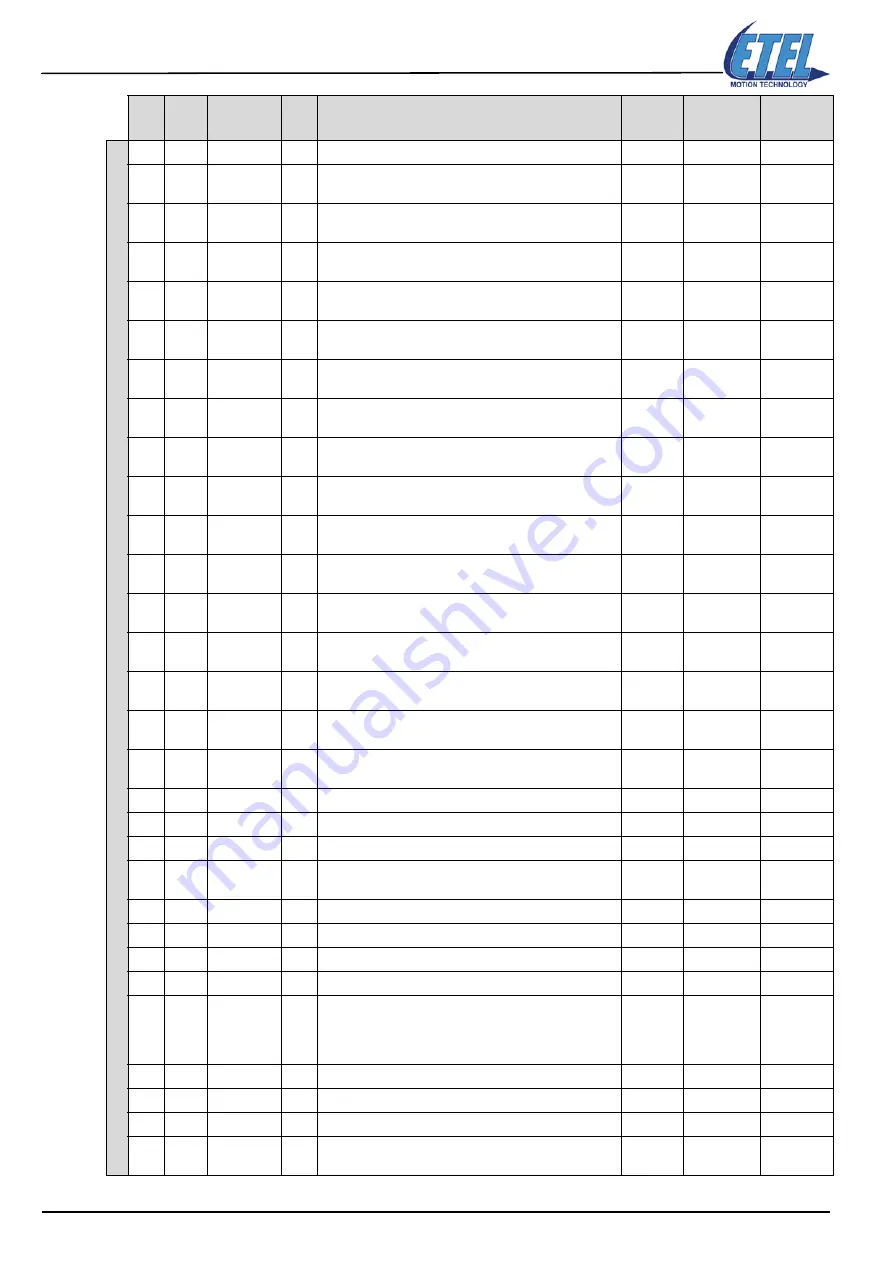
M63
TEB status
524288
0
4294967295
1
0
User word bit 0, could be modified by trigger functions or
by K177
2
1
User word bit 1, could be modified by trigger functions or
by K177
4
2
User word bit 2, could be modified by trigger functions or
by K177
8
3
User word bit 3, could be modified by trigger functions or
by K177
16
4
User word bit 4, could be modified by trigger functions or
by K177
32
5
User word bit 5, could be modified by trigger functions or
by K177
64
6
User word bit 6, could be modified by trigger functions or
by K177
128
7
User word bit 7, could be modified by trigger functions or
by K177
256
8
User word bit 8, could be modified by trigger functions or
by K177
512
9
User word bit 9, could be modified by trigger functions or
by K177
1024
10
User word bit 10, could be modified by trigger functions
or by K177
2048
11
User word bit 11, could be modified by trigger functions
or by K177
4096
12
User word bit 12, could be modified by trigger functions
or by K177
8192
13
User word bit 13, could be modified by trigger functions
or by K177
16384
14
User word bit 14, could be modified by trigger functions
or by K177
32768
15
User word bit 15, could be modified by trigger functions
or by K177
65536
16
The controller is in power on
524288
19
Bit present, always 1
1048576
20
The motor is executing a trajectory
2097152
21
This bit is set when the motor is in the position/time
window defined by K38 and K39
8388608
23
The controller is in warning mode
16777216
24
The controller is executing an internal sequence
67108864
26
The controller is in error mode
134217728
27
Trace busy flag is set during a register trace acquisition
1073741824
30
Position captured according to the digital input (see
K182/K178/K179). This bit is set when the conditions on
the digital input allow the capture of the position. It is
reset when 1 is written in K182
M64
Gives the error code
0
0
255
2
The current measured in phase 1 is greater than K83
3
The current measured in phase 2 is greater than K83
4
This occurs when M67 becomes greater than K85. This
is a power protection (of the motor and/or the controller)
M
Alias
Values
Bit #
<P1>
Comment for monitorings M
and <P1> of the DSCDP
Def. Val
<P1>
Min. Val
<P1>
Max. Val
<P1>







































































