





























Operation & Software Manual
136
Direct Drives & Systems
Chapter C: System functions
ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
• External position reference mode: K61=36 (refer to
for more information)
• Other parameters
Some parameters (other than those mentioned above), previously described in this manual, must be used with
stepper in open loop:
• Commutation look-up table parameters: K52 and K53 must be equal to 0 (refer to
for more information)
• Force inversion given by parameter K56 (refer to
for more information). Changing the
force in stepper mode as the same effect than changing the movement direction
• Encoder interpolation shift value given by parameter K77 must be equal to 0 (refer to
for more information)
• Encoder type selection given by parameter K79 must be equal to 20, 21, 23 or 24 (refer to
for more information)
• Current loop parameters given by parameters K80, K81 and K82 (refer to
and
• Current limits given by parameters K83, K84 and K85 (refer to
• Motor phase number given by parameter K89 must be equal to 20 or 30 (refer to
for
more information)
• The number of period per turn given by parameter K241 which is equal to K54 x 2 (refer to
for more information)
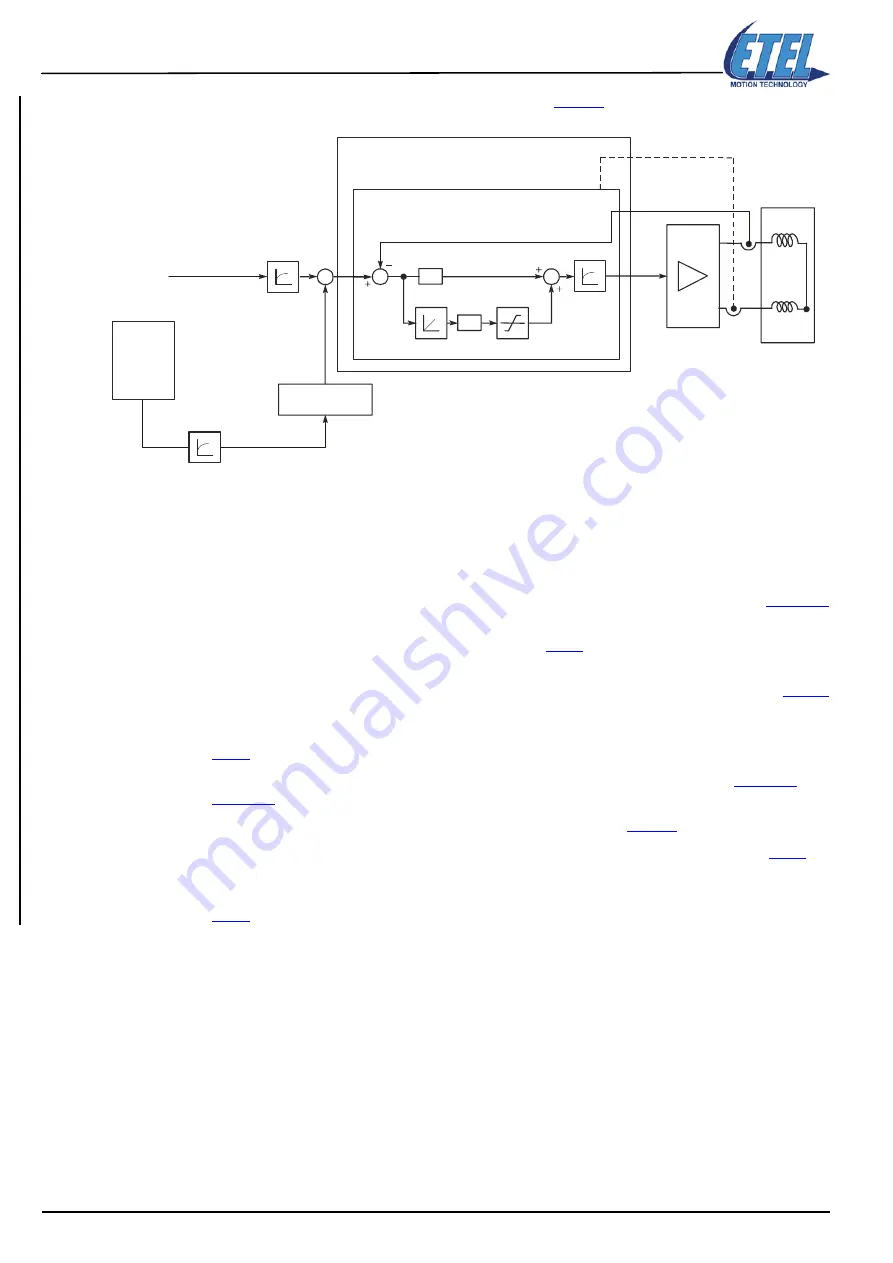
x
Integrator
Limit
1
st
order
filter
Current in phase 1
Phase 1
Phase 2
Motor
Current loop : 2 phases
I
1
K80
K81
K82
1
st
order
filter
K9
Motor commutation
look-up table
Theoretical
Current
reference
K60
trajectory
External
position
reference
1
st
order
filter
K213







































































