





























DVC6200f Digital Valve Controller
November 2010
116
Proportional and integral on error, derivative on
PV (PI_D)
Integral on error, proportional and derivative on
PV (I_PD)
Proportional on error, derivative on error (PD)
Integral on error, derivative on error (ID)
Integral on error, derivative on PV (I_D)
Two degrees of Freedom (2DOF)
Reverse and Direct Action
To configure the block output action, set the Direct
Acting control option. This option defines the
relationship between a change in PV [7] and the
corresponding change in output. With Direct Acting
enabled (True), an increase in PV results in an
increase in the output.
You can set control options in Manual or Out of
Service mode only.
Alarm Detection
A block alarm will be generated whenever the
BLOCK_ERR [6] has an error bit set. The types of
block error for the PID block are defined above.
Process alarm detection is based on the PV [7] value.
You can configure the alarm limits of the following
standard alarms:
High (HI_LIM [51])
High high (HI_HI_LIM [49])
Low (LO_LIM [53])
Low low (LO_LO_LIM [55])
Additional process alarm detection is based on the
difference between SP [8] and PV [7] values and can
be configured via the following parameters:
Deviation high (DV_HI_LIM [57])
Deviation low (DV_LO_LIM [59])
In order to avoid alarm chattering when the variable is
oscillating around the alarm limit, an alarm hysteresis
in percent of the PV span can be set using the
ALARM_HYS [47] parameter. The priority of each
alarm is set in the following parameters:
HI_PRI [50]
HI_HI_PRI [48]
LO_PRI [52]
LO_LO_PRI [54]
DV_HI_PRI [56]
DV_LO_PRI [58]
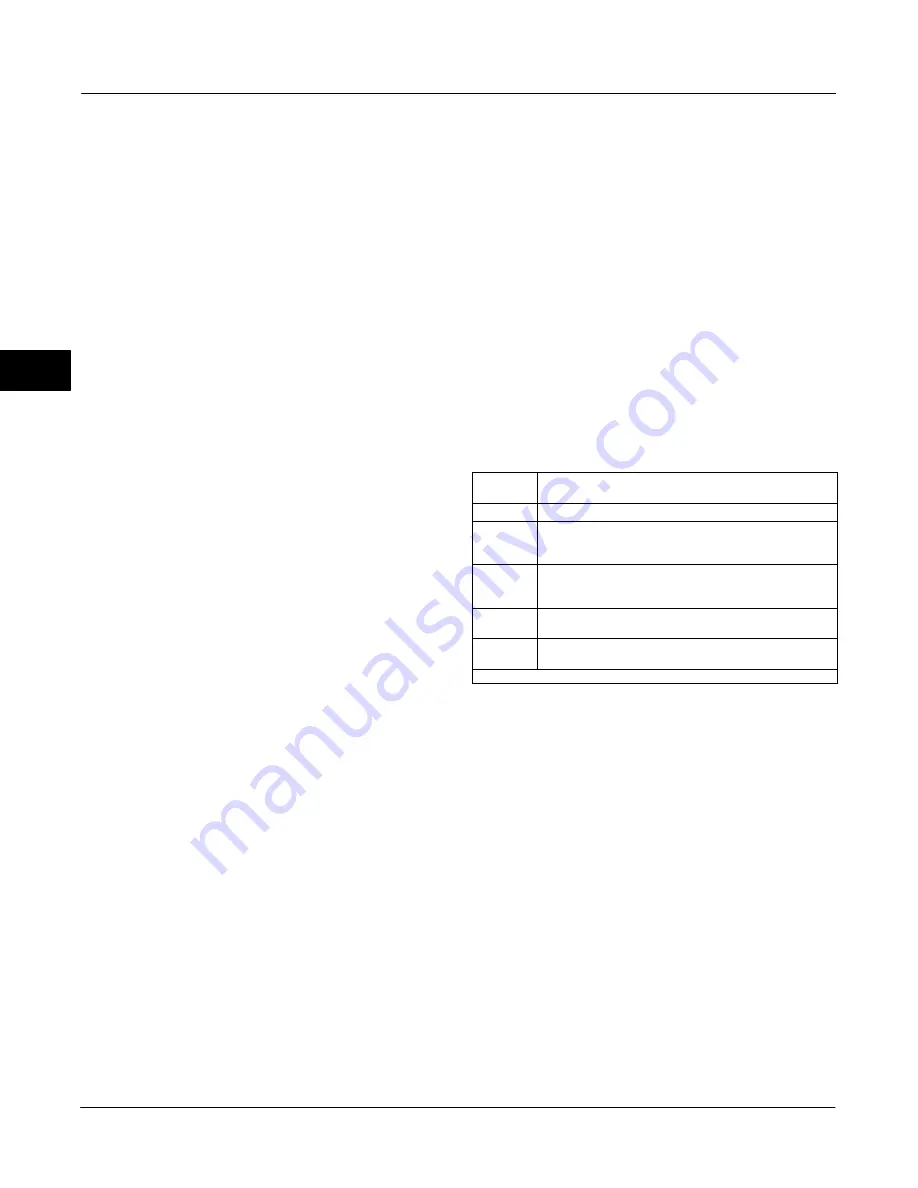
Alarms are grouped into five levels of priority, as
shown in table 4-30.
Table 4-30. PID Function Block Alarm Priorities
Priority
Number
Priority Description
(1)
0
The alarm is disabled
1
An alarm condition with a priority of 1 can be recognized
by the system. The device monitors the alarm but does
not report it until requested by the host system.
2
An alarm condition with a priority of 2 is reported to the
operator, but generally does not require operator attention
(such as diagnostics and system alerts).
3
−
7
Alarm conditions of priority 3 to 7 are advisory alarms of
increasing priority.
8
−
15
Alarm conditions of priority 8 to 15 are critical alarms of
increasing priority.
1. The priority classes “advise” and critical” have no relationship to Plant Web Alerts.
Application Information
The PID function block is a powerful, flexible control
algorithm that is designed to work in a variety of
control strategies. The PID block is configured
differently for different applications.
DeltaV Tune
DeltaV Tune quickly and automatically determines
optimal tuning parameters for PID control loops. For
more information on DeltaV Tune, refer to DeltaV
Books Online or DeltaV documentation.
4
Summary of Contents for FIELDVUE DVC6200f
Page 42: ...DVC6200f Digital Valve Controller November 2010 30 4 ...
Page 60: ...DVC6200f Digital Valve Controller November 2010 48 4 ...
Page 108: ...DVC6200f Digital Valve Controller November 2010 96 4 ...
Page 122: ...DVC6200f Digital Valve Controller November 2010 110 4 ...
Page 188: ...DVC6200f Digital Valve Controller November 2010 176 4 ...
Page 200: ...DVC6200f Digital Valve Controller November 2010 188 4 ...
Page 216: ...DVC6200f Digital Valve Controller November 2010 204 5 ...
Page 250: ...DVC6200f Digital Valve Controller November 2010 238 8 ...
Page 254: ...DVC6200f Digital Valve Controller November 2010 242 A ...
Page 284: ...DVC6200f Digital Valve Controller November 2010 272 D ...
Page 290: ...DVC6200f Digital Valve Controller November 2010 278 E ...
Page 308: ...DVC6200f Digital Valve Controller November 2010 296 F ...
Page 312: ...DVC6200f Digital Valve Controller September 2010 300 Notes G Glossary ...
Page 324: ...DVC6200f Digital Valve Controller November 2010 312 F Index ...





















































