























Appendix
EFORT INTELLIGENT EQUIPMENT CO.,LTD
286
or restarted;
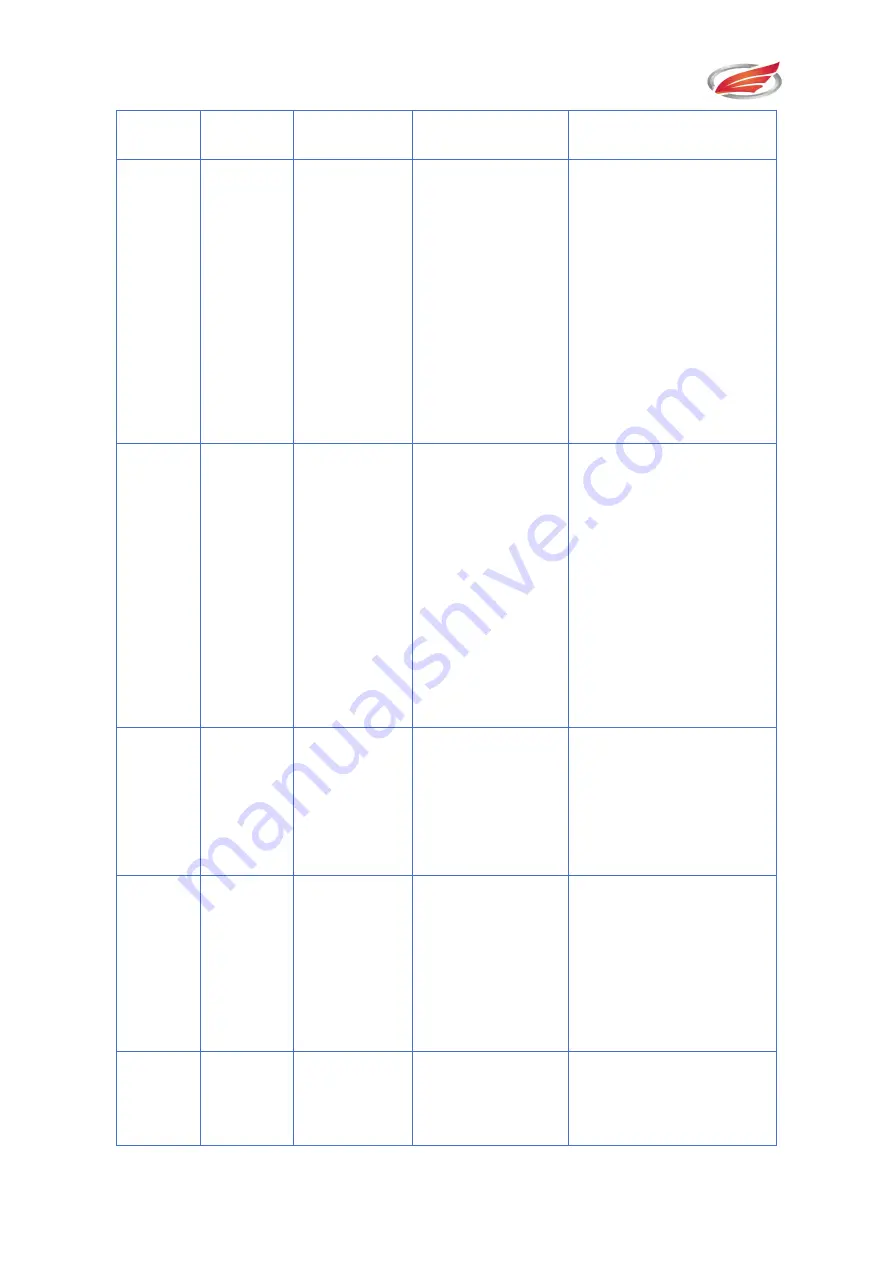
4965
0x220000
00
EFORT IO
board: The
analog output
is running
abnormally,
and the
device needs
to be
reinitialized
or restarted;
EFORT IO board:
The analog output
is running
abnormally.
The device needs to be
reinitialized or restarted.
4966
0x220000
00
EFORT IO
board: The
analog input
is running
abnormally,
and the
device needs
to be
reinitialized
or restarted;
EFORT IO board:
The analog input
is running
abnormally.
The device needs to be
reinitialized or restarted.
4967
0x220000
00
Drag
teaching:
Loading drag
configuration
file error
Drag teaching:
Fail to load drag
configuration file.
Check whether the drag
configuration file exists
or whether the content is
wrong.
4968
0x220000
00
Drag
teaching:
Loading
drive
parameter
file error
Drag teaching:
Fail to load drive
parameter file.
Check whether the drive
parameter file exists or
whether the content is
wrong.
4969
0x220000
00
Drag
teaching:
Loading end
Drag teaching:
Fail to load end
tool configuration
Check whether the end
setting file exists or
whether the content is





















































