





























Settings
EFORT INTELLIGENT EQUIPMENT CO.,LTD
90
2
①
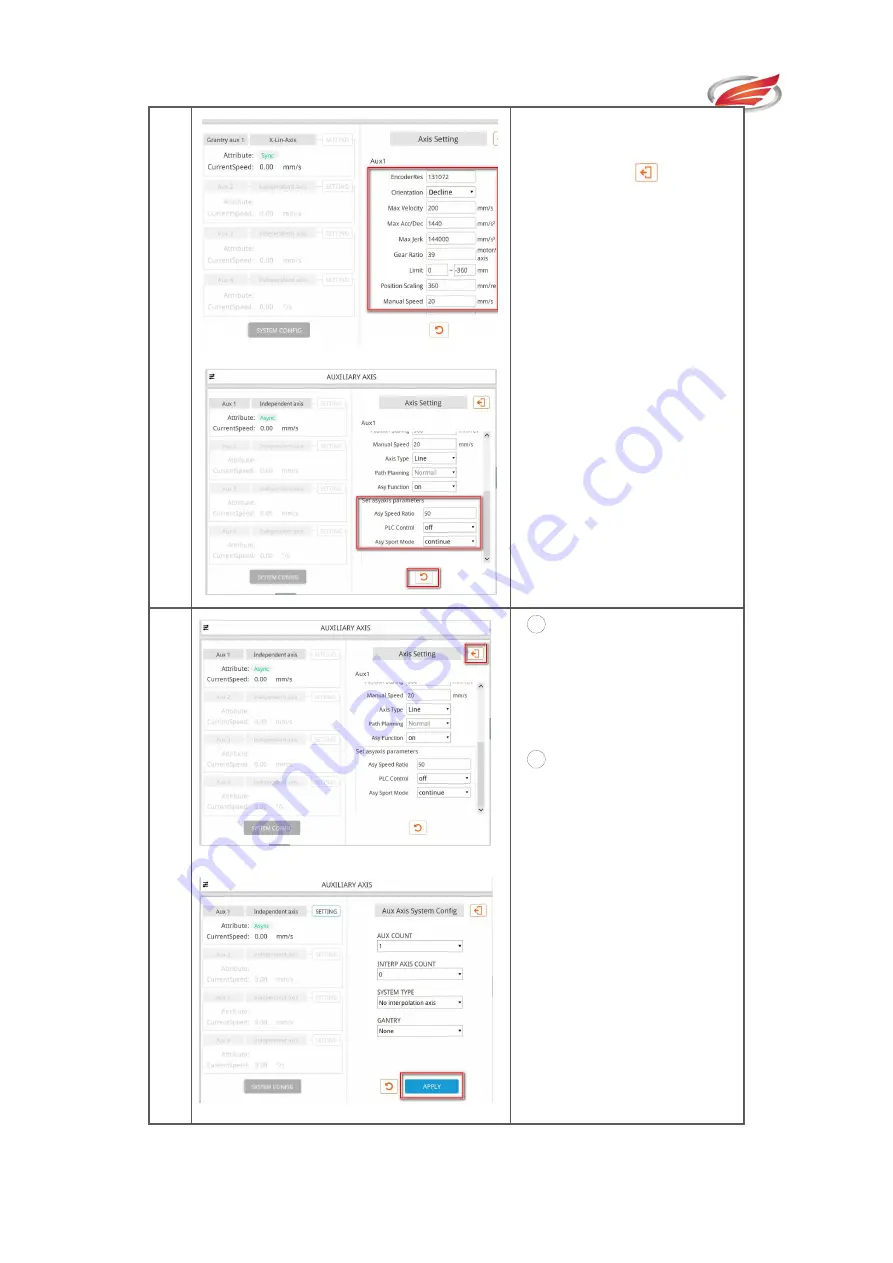
Configure the Paramet
ers.
②
Click on
, if you
don’t want to save the
parameters.
③
In addition to the basic
parameters, the parameters
of asynchronous axis need
to be configured after
turning on the function
switch of independent and
asynchronous axis.
3
1
After setting, click the
"Exit" button to return to
the system configuration
screen.
2
Click on APPLY to
save the configuration.