





























Monitor
EFORT INTELLIGENT EQUIPMENT CO.,LTD
219
Note: ANYBUS_ECAT is a common conversion function for gateway protocol, and
the ANYBUS gateway installation is required for hardware.
From PLC to Robot
In signal transport from PLC to Robot, the PLC is as sending end, and the robot is
as receiving end. Data received mainly include the system variables and the TPU
variables, where the Bus_Get[0]-Bus_Get[191] is 192 Byte as the data reception.
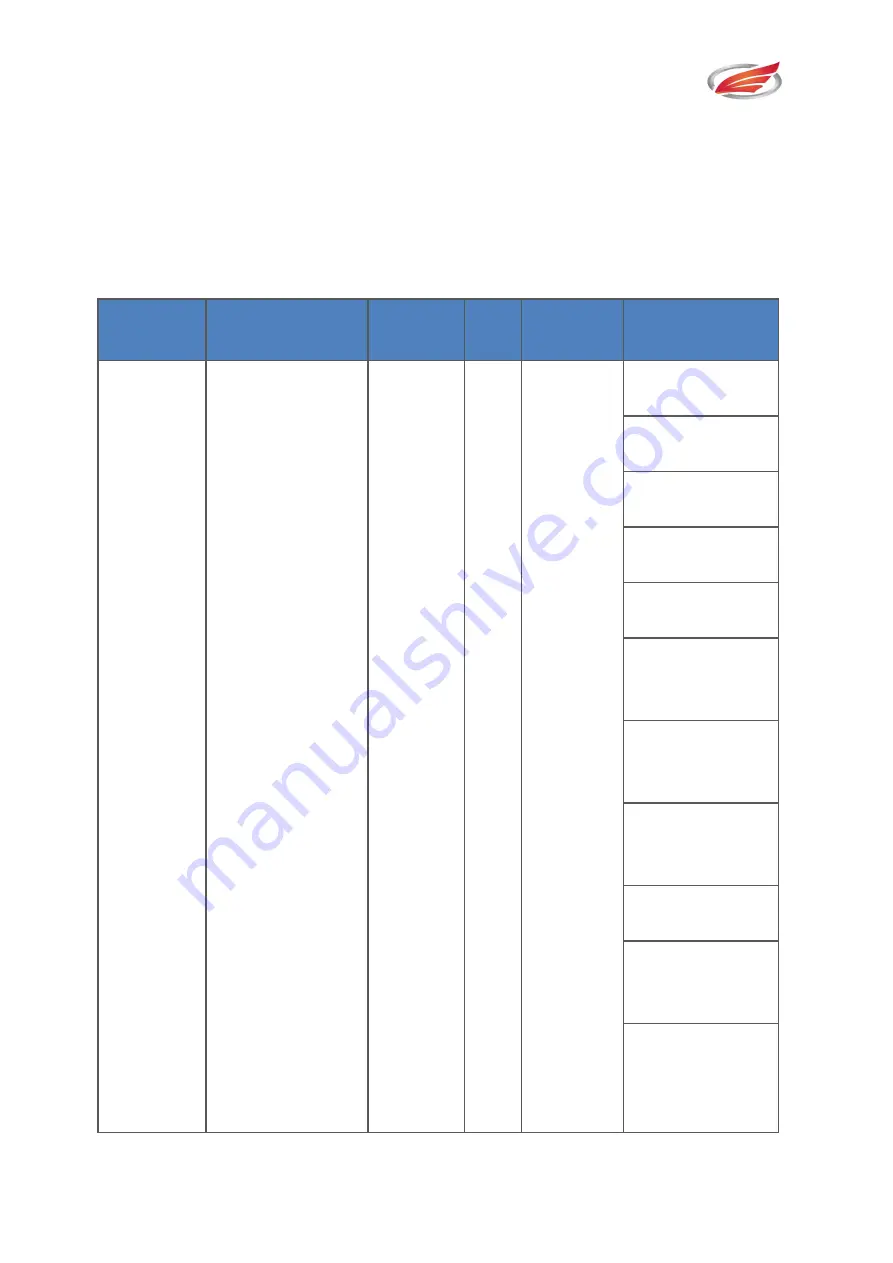
Table 7-7 The data receiving protocol of EtherCAT
Variable
Type
Physical Address
Unit
Bytes
Sub-Unit
Remark
System Va
riable
Bus_Get[0]-[1]
I16
2
BOOL
Bit0
:
Servo on /
off (Pulse)
Bit1: Running (P
ulse)
Bit2: Termination
(Pulse)
Bit3: Clear an al
arm (Pulse)
Bit4: Load a pro
gram (Pulse)
Bit5: Program re
peats from the fi
rst line (Pulse)
Bit6: PLC warnin
g
(
High level sig
nal
)
Bit7: Servo prepa
ration confirm
(
P
ulse
)
Bit8: Type of ro
bot position
Bit9: Program ap
pointment for ad
ding confirmation
Bit10: Program a
ppointment for d
eleting confirmati
on






































































