





























Monitor
EFORT INTELLIGENT EQUIPMENT CO.,LTD
235
]
Bus_Get[78]-[79]
FLOAT
2
FLOAT
Corresponding to
fidbus.eip_wo_r[17
]
Bus_Get[80]-[81]
FLOAT
2
FLOAT
Corresponding to
fidbus.eip_wo_r[18
]
Bus_Get[82]-[83]
FLOAT
2
FLOAT
Corresponding to
fidbus.eip_wo_r[19
]
Bus_Get[84]-[85]
FLOAT
2
FLOAT
Corresponding to
fidbus.eip_wo_r[20
]
Bus_Get[86]-[87]
FLOAT
2
FLOAT
Corresponding to
fidbus.eip_wo_r[21
]
Bus_Get[88]-[89]
FLOAT
2
FLOAT
Corresponding to
fidbus.eip_wo_r[22
]
Bus_Get[90]-[91]
FLOAT
4
FLOAT
Corresponding to
fidbus.eip_wo_r[23
]
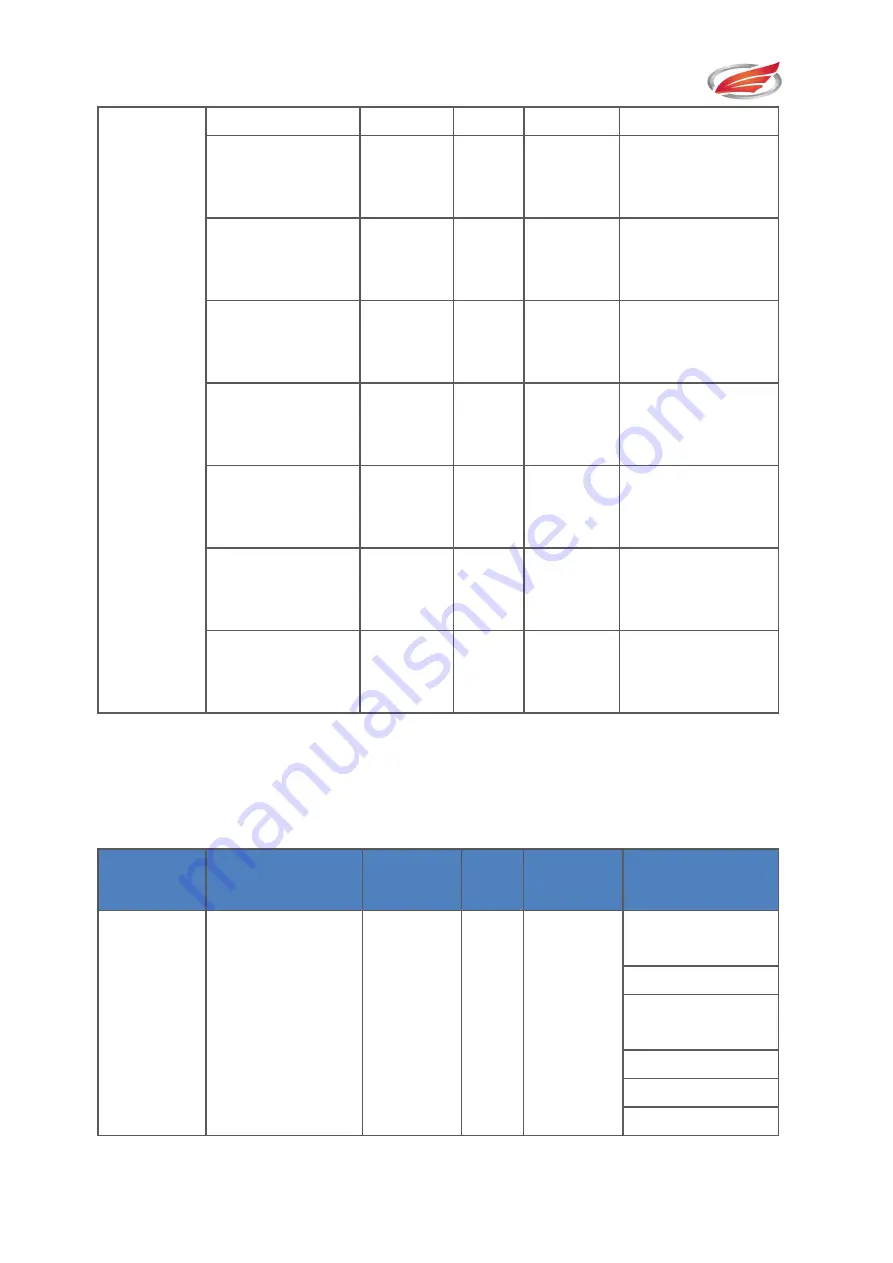
From Robot to PLC
In signal transport from Robot to PLC, the PLC is as receiving end, and the robot is
as sending end. Data sent mainly include the system variables and the TPU
variables, where the Bus_Set[0]-Bus_Set[191] is 192 Byte as the data sending.
Table 7-10 The data sending protocol of Ethernet/IP
Variable
Type
Physical Address
Unit
Bytes
Sub-Unit
Remark
System Va
riable
Bus_Set[0]
I16
1
BOOL
Bit0: Manual mo
de
Bit1: Auto mode
Bit2: Remote con
trol
Bit3: Servo status
Bit4: Alarm
Bit5: Emergency






































































