





























B8961 and B8962 User Manual
122
Serial Immediate Status Commands
Note: All but the S and K commands require an address.
Command Command Description and Application Examples
Syntax
CB
Clear Command Buffer
Clears the terminal input buffer and buffered com-
mand buffer
<n>CB
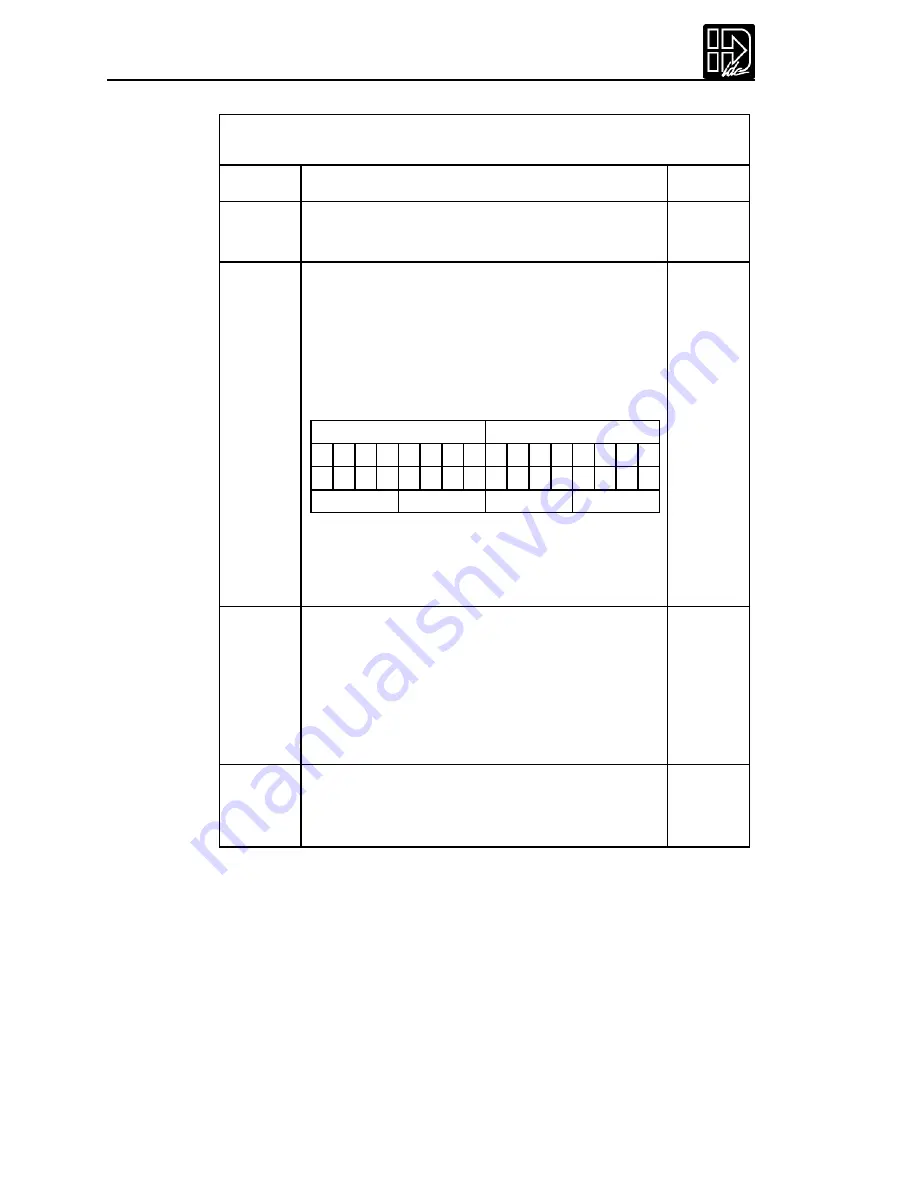
IS
Tell Input States
Returns the current state (on or off) of the 8 inputs.
The status is returned as a four digit hexadecimal
number, preceded by an asterisk. The least signifi-
cant digit represents the binary value of inputs 4-1.
Example: IS returns *00F6<cr> with the input condi-
tions shown in this table
Your computer program will have to decode the hexa-
decimal number to determine the state of any each
input.
<n>IS
K
Kill
Issuing the K command causes the control to abrupt-
ly stop commanding further motion and temrinates
program execution. No deceleration ramp is used
with this command. Caution should be used in issu-
ing this command because of the damage instanta-
neous deceleration could cause to mechanics. The
Stop commands provides a more controlled halt.
<n>K
MN
Model Number
Returns the unit model number..
MN command responses are: *S6961 *S6962 *B8961
or B8962
<n>MN
n/a
inputs
16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
off off off off off off off off off on on on off on on off
0
0
F
6
Summary of Contents for B8961
Page 111: ...109 Chapter 7 Programming with Serial Communication...
Page 132: ...B8961 and B8962 User Manual 130...
Page 136: ...B8961 and B8962 User Manual 134 B8961 and B8962 Hardware Connections...
Page 137: ...135 Chapter 8 Hardware Reference B8961 and B8962 Input and Output Schematics...
Page 138: ...B8961 and B8962 User Manual 136 Connecting IDC Limit Switches to the B8961 2...
Page 156: ...B8961 and B8962 User Manual 154...





















































