





























1.1 Configuration with a Rotary Servomotor
1-2
1.1
Configuration with a Rotary Servomotor
*1.
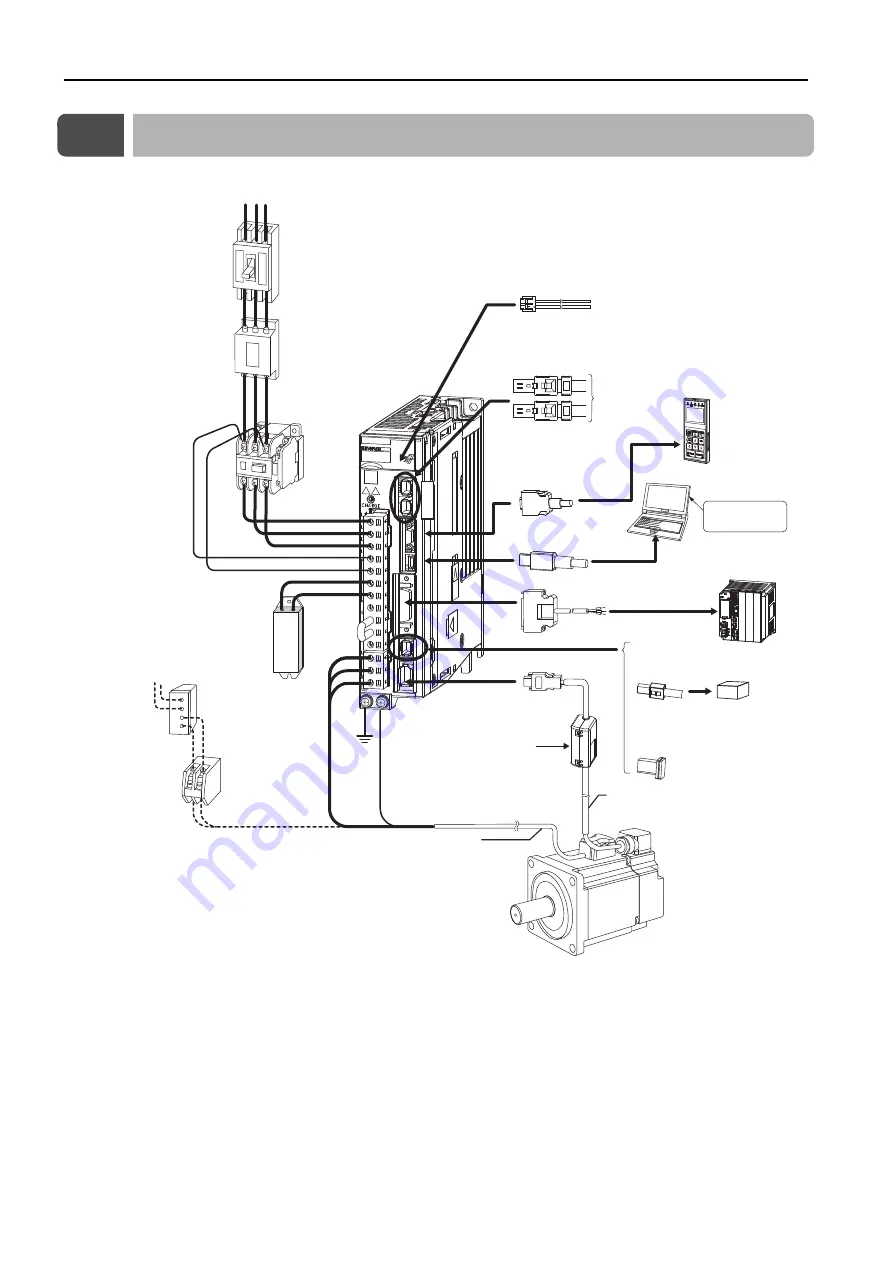
The peripheral devices are described using a MECHATROLINK-III Communications Reference SERVOPACK for
a three-phase 200-VAC power supply input as an example. The shapes of the connectors and pin layout may
be different for SERVOPACKs with other power supply input specifications and for other interfaces.
*2.
The connected devices depend on the interface.
For MECHATROLINK-II communications references: Other MECHATROLINK-II stations
For analog voltage/pulse train references: There is no CN6 connector.
*3.
A Holding Brake Power Supply Unit is required to use a Servomotor with a Holding Brake. Holding Brake Power
Supply Units for 24 VDC are not provided by Yaskawa. Obtain these from other manufacturers.
Never connect Holding Brake Power Supply Units with different output voltages to a SERVOPACK. Overcurrent
may result in burning in the brake.
*4.
If you use a Servomotor with a Holding Brake, select a brake relay according to the power supply voltage and
current of the brake. Yaskawa does not recommend any particular brake relays. Select an appropriate brake
relay using the selection method of the brake relay manufacturer.
*5.
The power supply for the holding brake is not provided by Yaskawa. Select a power supply based on the hold-
ing brake specifications. If you use a 24-V brake, install a separate power supply for the 24-VDC power supply
from other power supplies, such as the one for the I/O signals of the CN1 connector. If the power supply is
shared, the I/O signals may malfunction.
R
S
T
C
N
6
Ground
cable
(Wiring required for a
S
ervomotor with a Brake)
Encoder Cable
Refer to chapter 2 to 7 depending
on the motor that you are u
s
ing.
Holding Brake
Power
S
upply Unit
*3, *4, *5
Brake Relay
*4
External Regenerative
Re
s
i
s
tor
Noi
s
e Filter
Molded-ca
s
e
circuit breaker
Magnetic Contactor
I/O
S
ignal Cable
S
ERVOPACK
*1
S
ervomotor
Power
s
upply
Three-pha
s
e, 200 VAC
*1
Computer
Computer Cable
Control Power
S
upply Cable
Digital Operator
(JU
S
P-OP05A-1-E)
Digital
Operator cable
200 VAC
Ho
s
t controller
MECHATROLINK Communication
s
Cable
*1
To next
MECHATROLINK-III
s
tation
*2
Analog Monitor Cable
S
afety Function Device Cable
S
afety function device
S
ERVOPACK
main circuit wire
s
Engineering
Tool
Battery Ca
s
e
(Required when an
ab
s
olute encoder i
s
u
s
ed.)
When not u
s
ing a
s
afety function,
leave the
S
afety Jumper Connector
connected to the
S
ERVOPACK.
External
Regenerative
Re
s
i
s
tor
Cable
S
ervomotor
Main Circuit Cable
Refer to chapter 2 to 7
depending on the motor
that you are u
s
ing.
Surge Absorbers (page 12-31)
Reactors (page 12-28)
Surge Absorbers (Varistors) and Diodes for Holding Brake Power Supplies (page 14-2)
(pages 10-30 and 10-31)







































































