





























1-4
1
o
verview
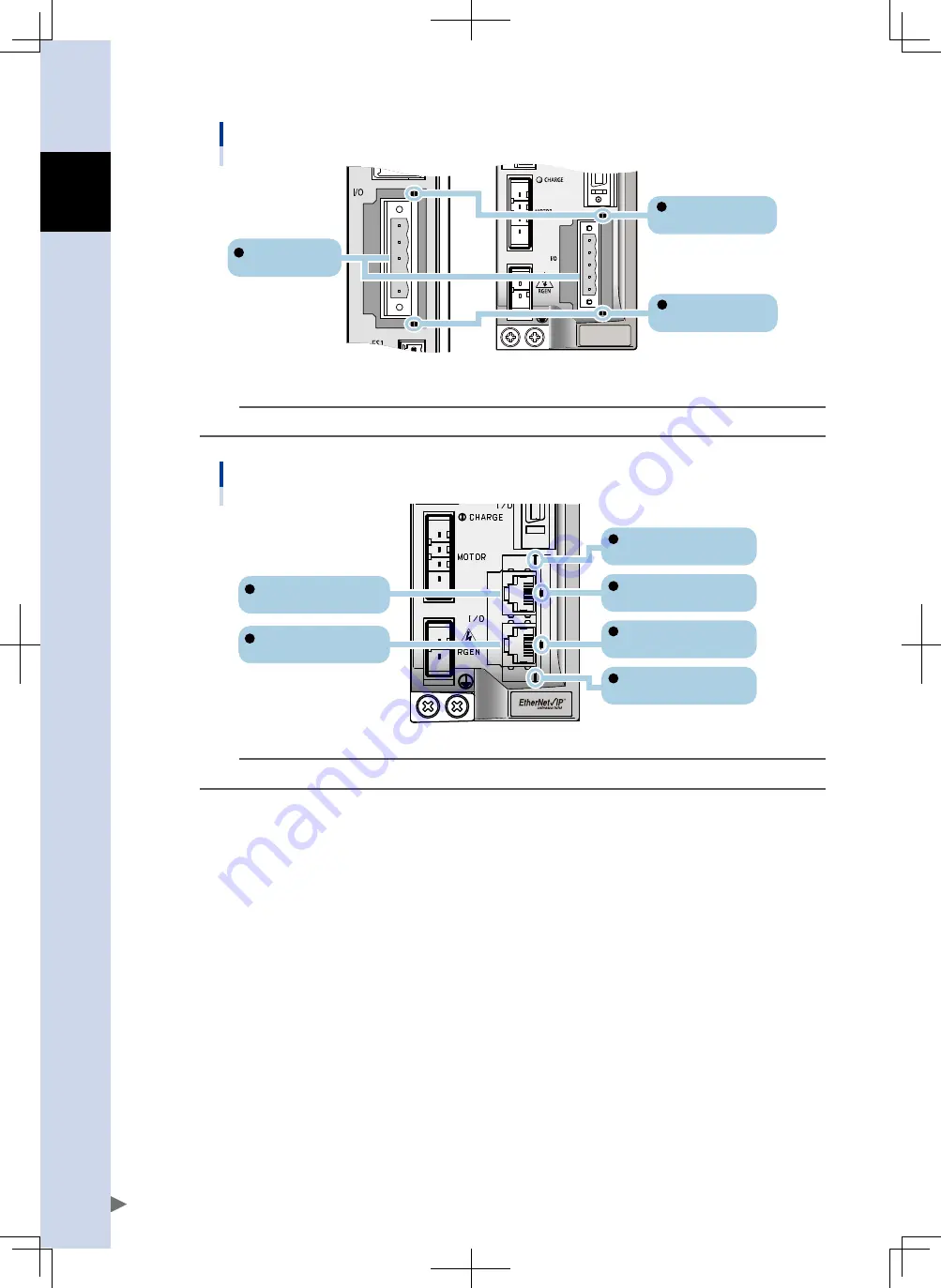
DeviceNet
TS-S, TS-S2, TS-SH
TS-X, TS-P
NS LED
Green/Red when lit.
MS LED
Green/Red when lit.
Communication
connector
23103-M0-00
TIP
See Chapter 7 section 2.4, "DeviceNet" for details of LED indicator lamp meanings.
NS
MS
EtherNet/IP
Link/Activity 1 LED
Green when lit.
Link/Activity 2 LED
Green when lit.
MS LED
Green/Red when lit.
NS LED
Green/Red when lit.
EtherNet connection
connector 1
EtherNet connection
connector 2
23216-M0-00
TIP
See Chapter 7 section 2.5, "EtherNet/IP" for details of LED indicator lamp meanings.
Содержание TS-S
Страница 2: ......
Страница 12: ......
Страница 14: ......
Страница 28: ......
Страница 70: ......
Страница 72: ......
Страница 92: ......
Страница 164: ......
Страница 172: ......
Страница 174: ......
Страница 230: ......
Страница 232: ......
Страница 254: ......
Страница 274: ......
Страница 276: ......
Страница 285: ......







































































