





























3
Data setting
3-3
2.1 "Standard setting" type
The optimum acceleration is automatically set simply by specifying the desired payload.
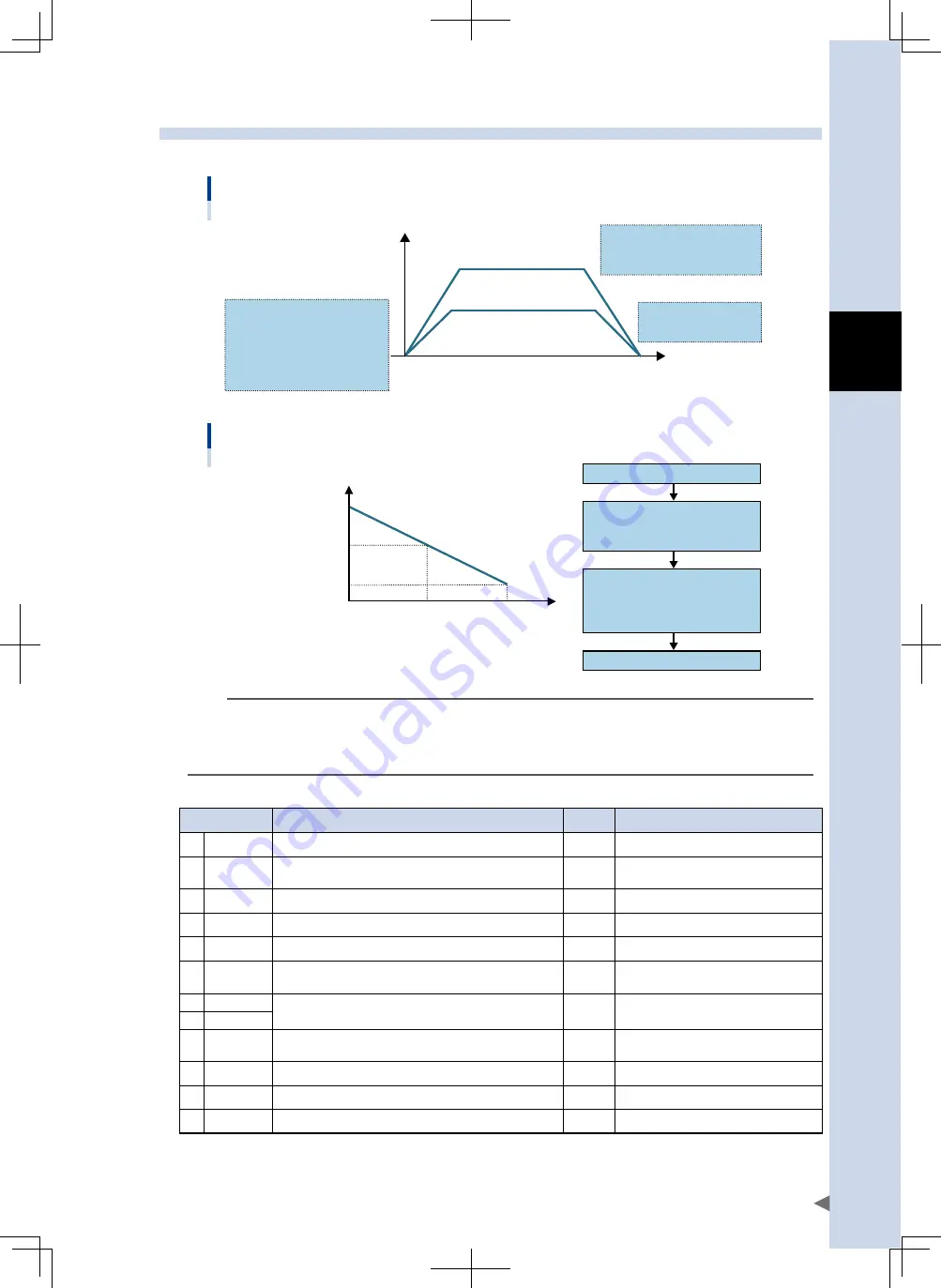
Speed and acceleration concept
The optimum acceleration percentage
value (%) is specified in accordance
with the movement amount and
movement speed, based on the max.
payload accel. which is automatically
set when the payload is specified.
Speed
"Accel." = 100%
Time
"Decel. speed" = 100%
Specified as a percentage of
the max. speed for each
robot.
Specified as a percentage
of the accel.
"Speed" = 100%
"Speed" = 50%
23302-M0-00
Acceleration calculating algorithm
Payload is set.
Accel. is determined and set.
Max. payload accel. is automati-
cally set based on the payload.
(See fig. at left.)
Optimum accel. is calculated in
accordance with the movement amount
and movement speed, based on the
Max. payload accel. at operation START.
m/s
2
kg
Max. payload accel.
(max. accel.) for 0kg payload
Max. payload accel.
for payload setting
Max. payload
weight
Payload
setting value
Max. payload accel.
for max. payload
23303-M0-00
TIP
Payload settings are specified at the K76 (Payload 1) and K78 (Payload 2) servo parameters. (See section 4.2,
"Parameter details" of this manual for details.)
If 2 payloads have been set, either setting can be selected for each point data. (See the "Flag" item in section 3,
"Point data details" of this manual for details.)
Point data setting range and default settings
n
Data Item
Setting Range
Units
*2
Default
1
RUN type
1 to 8 (8 types)
-
1
2
Position
Other than TS-P
: -9999.99 to 9999.99
TS-P
: -9999.999 to 9999.999
mm
0.00
3
Speed
1 to 100
%
100
4
Accel.
1 to 100
%
100
5
Decel.
1 to 100
%
100
6
Push
TS-S, TS-S2, TS-SH : 1 to upper limit (depends on robot type)
*1
TS-X, TS-P
: 1 to 100
%
TS-S, TS-S2, TS-SH : Depends on robot type
TS-X, TS-P
: 100
7
Zone (-)
Other than TS-P
: -9999.99 to 9999.99
TS-P
: -9999.999 to 9999.999
mm
0.00
8
Zone (+)
9
Near width
Other than TS-P
: 0.00 to 9999.99
TS-P
: 0.000 to 9999.999
mm
1.00
10
Jump
0 to 255
-
0
11
Flag
0 to 15
-
0
12
Timer
0 to 30000
ms
0.00
*1. The upper limit setting of the push force is the maximum push force of each model.
*2. Depending on the robot model, the point data system-of-units which appears in the User's Manual and support tools may differ
from the actual system-of-units.
Содержание TS-S
Страница 2: ......
Страница 12: ......
Страница 14: ......
Страница 28: ......
Страница 70: ......
Страница 72: ......
Страница 92: ......
Страница 164: ......
Страница 172: ......
Страница 174: ......
Страница 230: ......
Страница 232: ......
Страница 254: ......
Страница 274: ......
Страница 276: ......
Страница 285: ......







































































