





























110 •
750-671 [Steppercontroller]
Expanded Positioning Functions
WAGO-I/O-SYSTEM
750
I/O
Modules
The current actual value can be saved as the reference point for relative travel
measurement.
The soft limit switches Drive_Range_Pos and Drive_Range_Neg can also be
taught.
2.1.2.12.4
Control of a Motor Brake
Control of the motor brake is conducted using the Brake bit (see Chapter 3.4,
„Bit field for I/O driver“).
This bit is only available as an internal bit, as this module is not equipped with
digital outputs. Nevertheless, reconfiguration can be performed to redirect this
bit to a bit in the input process image that is not needed.
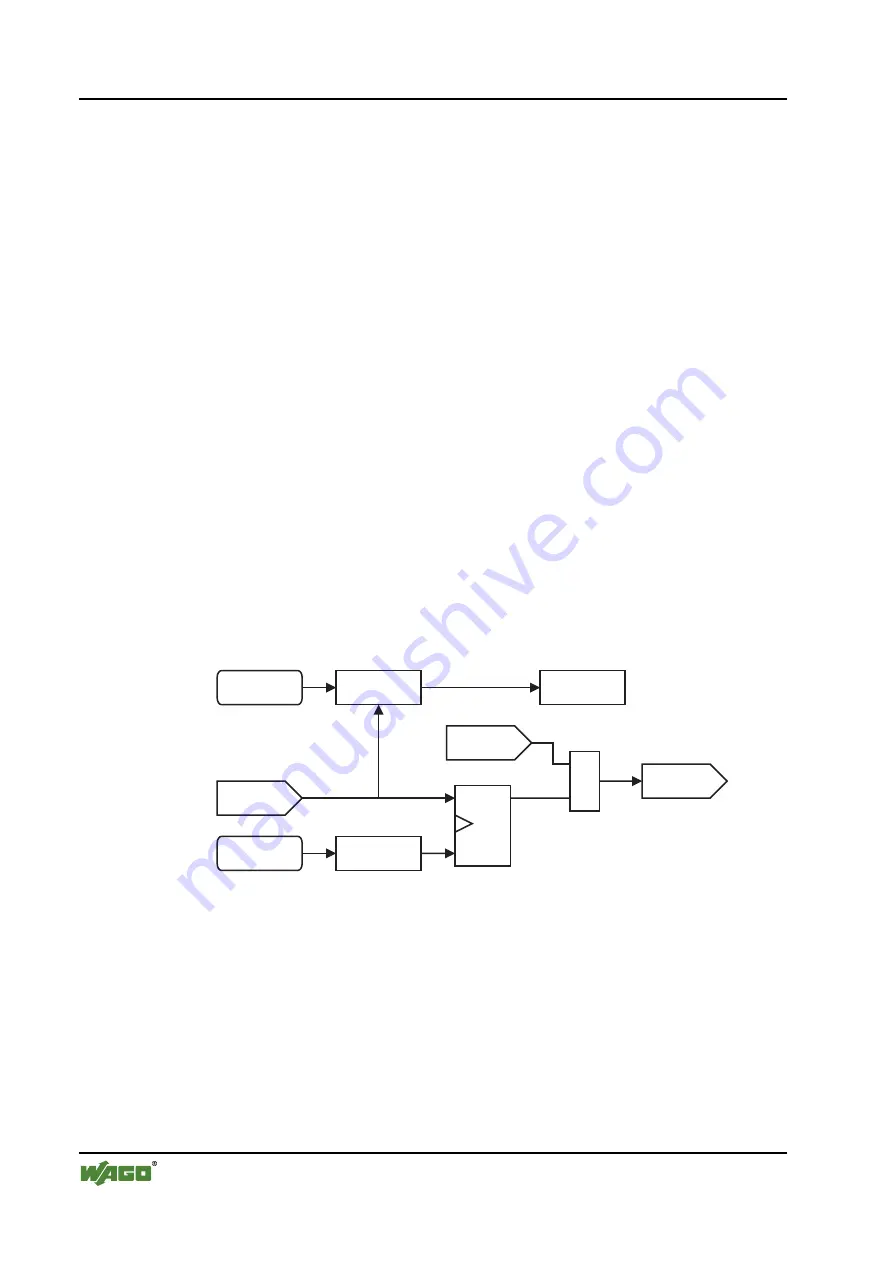
Control of this bit is performed from two OR-linked sources.
On the one hand, the Brake bit is set automatically as soon as the drive is
running and is canceled as soon as the drive is at standstill. Defining of
automatic control is performed using the configuration parameters
Braketime_Turn_On and Braketime_Turn_Off. The Brake bit is then activated
directly after the start of a move command. If the bit has not been set,
execution of the move command will, however, be delayed by the
Braketime_Turn_On time. The configuration parameter Braketime_Turn_Off
defines the deactivation time for the Brake bit. This bit is deactivated before
the target is reached by the Braketime_Turn_Off time. The brake can be
controlled directly with this bit. The brake is released when the bit is set, and
is applied when the bit is canceled.
S
R
Q
/
Q
S
ET
CL
R
>
=
1
Bra
k
et
i
me
_
T
urn
_
Off
B
i
t
Bra
k
e
_
Manua
l
B
i
t
Bra
k
e
Bra
k
et
i
me
_
T
urn
_
On
B
i
t
Start
De
l
ay
Start for the
target
p
os
i
t
i
on
Fi
rst shutdown
B
i
t StandSt
ill
Fig. 2.1.2-35: Control of motor brake
g067x17e
As an alternative, the brake can also be operated independently using the
Brake_Manual bit (see Chapter 3.4, „Bit field for I/O driver“). This bit can be
set and canceled externally and can also, for example, be linked to a camshaft
channel so that it is switched as a function of position.







































































