





























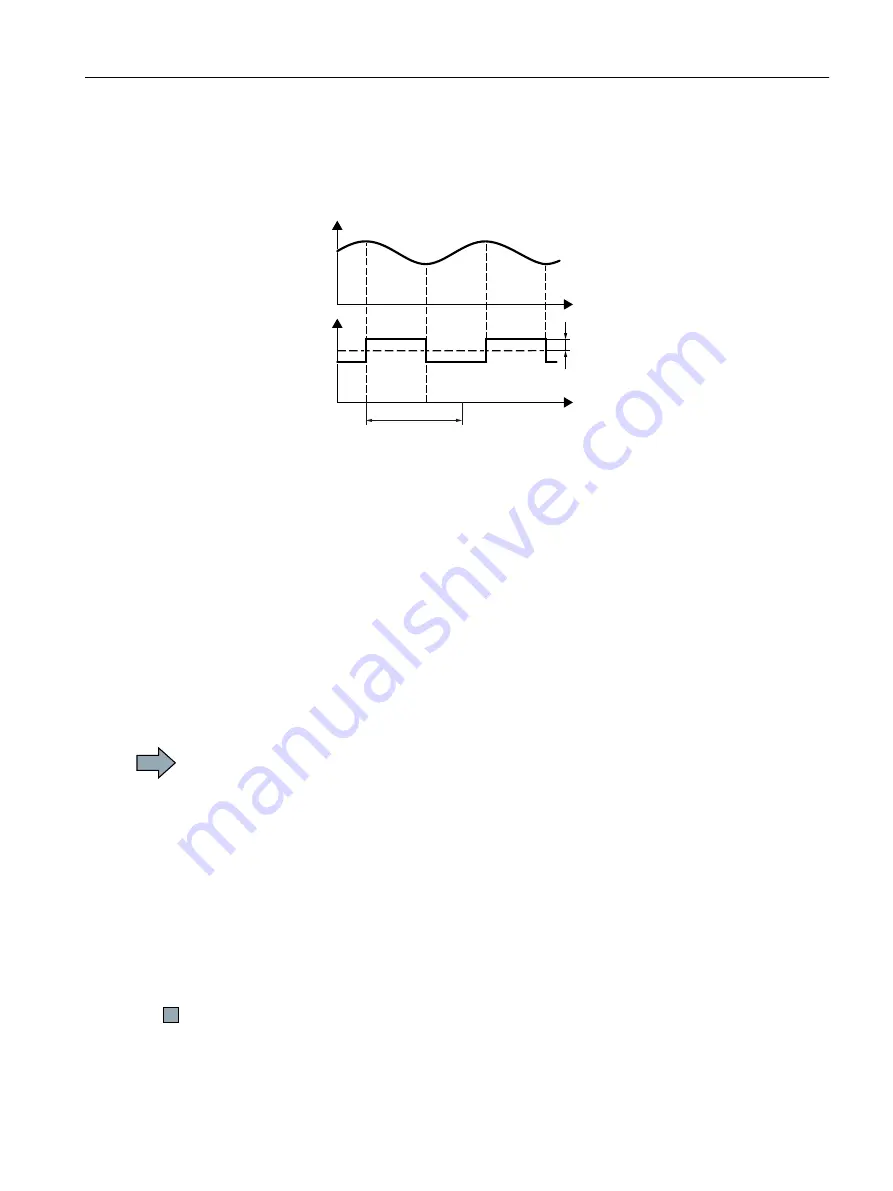
The speed setpoint results from the technology setpoint and a superimposed rectangular signal
with amplitude p2355. If actual value = technology setpoint ± p2355, the autotuning function
switches the polarity of the superimposed signal. This causes the inverter to excite the process
variable for an oscillation.
$FWXDOYDOXH
)LOOLQJOHYHOVHWSRLQW
6SHHGVHWSRLQW
W
S
W
S
Figure 6-44 Example for speed setpoint and actual process value for autotuning
The inverter calculates the parameters of the PID controller from the determined oscillation
frequency.
Autotune the PID controller
Requirements
The PID technology controller must be set the same as when used in subsequent operation:
● The actual value is interconnected.
● Scalings, filter and ramp-function generator have been set.
● The PID technology controller is enabled (p2200 = 1 signal)
Procedure
Proceed as follows to auto tune the PID controller:
1. Select with p2350 the appropriate controller setting.
2. Switch on the motor.
The inverter signals Alarm A07444.
3. Wait until alarm A07444 goes away.
The inverter has recalculated parameters p2280, p2274 and p2285.
If the inverter signals fault F07445:
– If possible, double p2354 and p2355.
– Repeat the autotuning with the changed parameters.
4. Back up the calculated values so that they are protected against power failure, e.g. using
the BOP‑2: OPTIONS → RAM‑ROM.
You have auto tuned the PID controller.
Advanced commissioning
6.18 PID technology controller
SINAMICS G120C converter
Operating Instructions, 09/2017, FW V4.7 SP9, A5E34263257B AF
255
Содержание SINAMICS G120C
Страница 2: ......
Страница 14: ...Table of contents SINAMICS G120C converter 14 Operating Instructions 09 2017 FW V4 7 SP9 A5E34263257B AF ...
Страница 469: ......







































































