





























Status
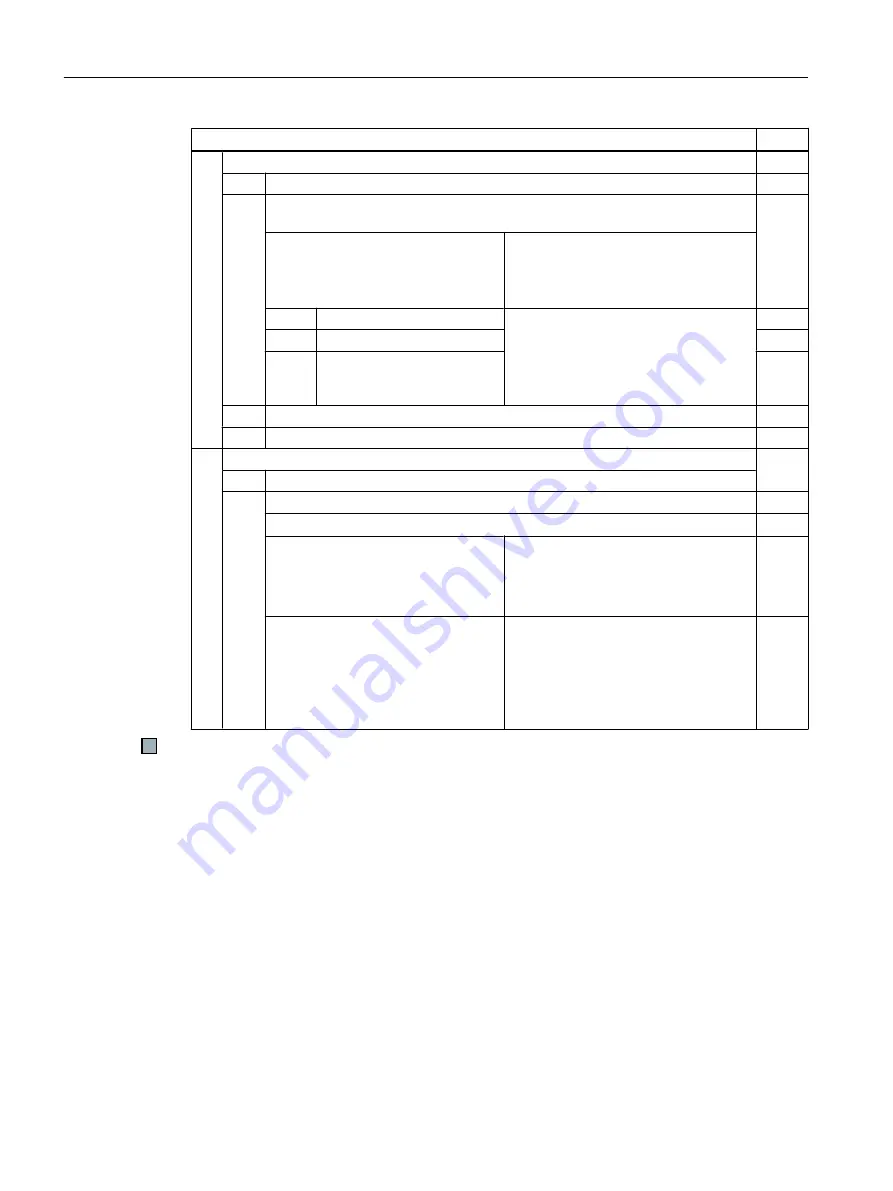
2. Switch on motor
2.1. Specify a speed setpoint which is above the SSM limit.
2.2.
The following procedure depends on how you have set the SSM function during
commissioning:
Diagram 1:
The "speed below limit value" check‐
back signal remains active when the
motor is switched off.
Diagram 2:
The "speed below limit value" checkback
signal becomes inactive when the motor
is switched off.
2.2.1. Select STO.
Switch on the motor (ON command).
2.2.2. Deselect STO again.
2.2.3. Switch on motor within 5 s of
deselecting STO (ON com‐
mand).
2.3. Check that the correct motor is running.
2.4. Wait until the motor speed reaches the setpoint.
3. Switch off the motor
3.1. Switch off the motor (OFF1 command).
3.2. Analyze the trace:
● If r9714[0] > velocity limit p9346, r9722.15 = 0 applies.
SSM without hysteresis:
● If r9714[0] < velocity limit p9546,
r9722.15 = 1 applies.
SSM with hysteresis:
● If r9714[0] < velocity limit p9546 ‑
hysteresis p9547, r9722.15 = 1
applies.
The "speed below limit value" check‐
back signal remains active when the
motor is switched off:
● If the motor is switched off
(r0899.11 = 0), then r9722.15 = 1
applies.
The "speed below limit value" checkback
signal becomes inactive when the motor
is switched off:
● If the motor is switched off
(r0899.11 = 0), then r9722.15 = 0
applies.
You have completed the acceptance test of the SSM function.
Appendix
A.2 Examples of acceptance tests
Safety Integrated - SINAMICS G110M, G120, G120C, G120D and SIMATIC ET 200pro FC-2
400
Function Manual, 01/2017, FW V4.7 SP6, A5E34261271B AD







































































