





























8.5.2
Safe Torque Off (STO) and Safe Brake Control (SBC)
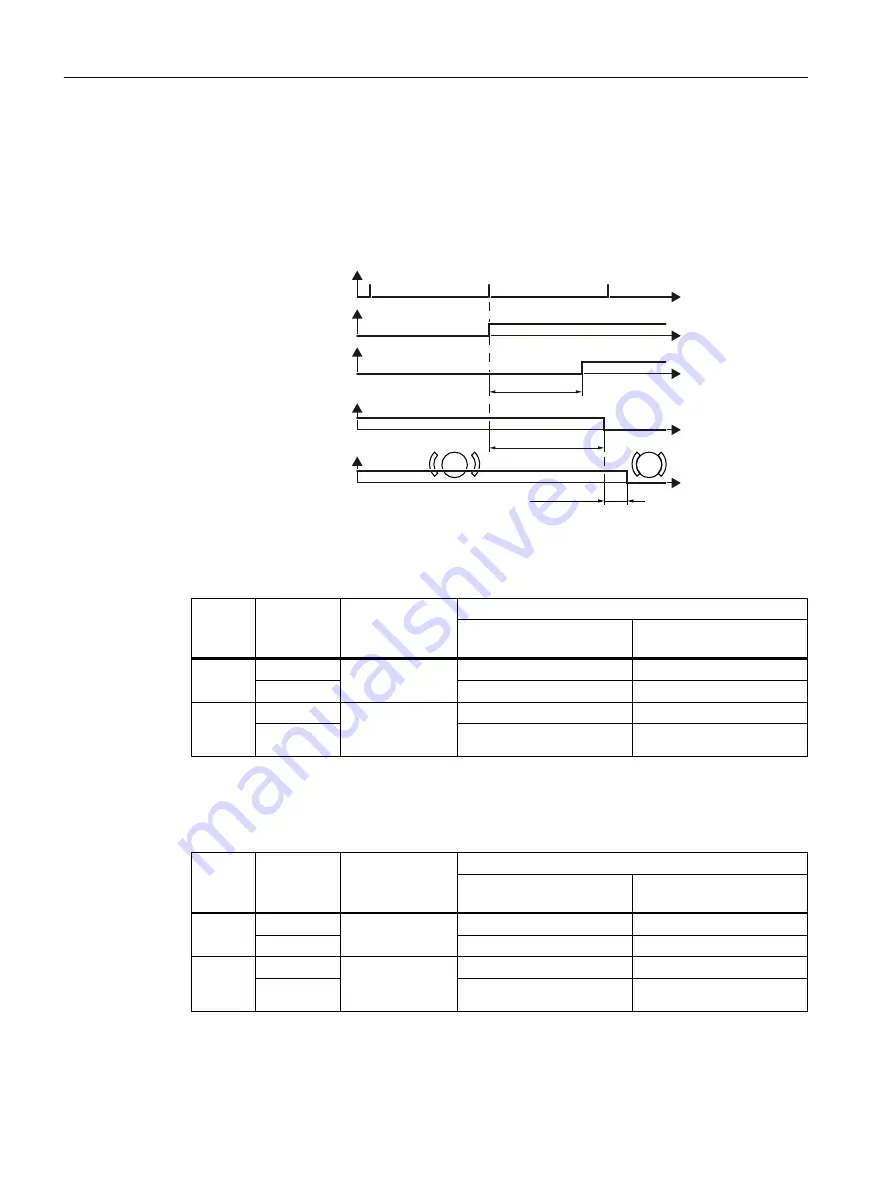
The response time of the STO function is the time between selecting the function and the
function becoming active.
Response times when selected via PROFIsafe
0
0
5HFHLYH352),VDIH
WHOHJUDP
6HOHFW672
672LVDFWLYH
672UHVSRQVH
WLPH
2XWSXW
6%&UHVSRQVHWLPH
0RWRUKROGLQJEUDNHLVWRSHQ
%UDNHFORVLQJ
WLPH
W
W
W
6DIH%UDNH5HOD\
W
W
Figure 8-1
Response times when selected via PROFIsafe
Table 8-2
Response times when using the basic functions
Function Selection
via
Response
Response time
Worst case for a fault-free
inverter
Worst case for an inverter
fault
STO
PROFIBUS STO is active
14 ms
14 ms
PROFINET
14 ms + bus cycle time
1)
14 ms + bus cycle time
1)
SBC
PROFIBUS Signal change at
the output of the
Safe Brake Relay
16 ms
30 ms
PROFINET
16 ms + bus cycle time
1)
30 ms + bus cycle time
1)
1)
Bus cycle time: Time for cyclic data exchange via PROFINET
Table 8-3
Response times when using the extended functions
Function Selection
via
Response
Response time
Worst case for a fault-free
inverter
Worst case for an inverter
fault
STO
PROFIBUS STO is active
54 ms
56 ms
PROFINET
54 ms + bus cycle time
1)
56 ms + bus cycle time
1)
SBC
PROFIBUS Signal change at
the output of the
Safe Brake Relay
56 ms
62 ms
PROFINET
56 ms + bus cycle time
1)
62 ms + bus cycle time
1)
1)
Bus cycle time: Time for a cyclic data exchange via PROFINET.
System properties
8.5 Response times after selection
Safety Integrated - SINAMICS G110M, G120, G120C, G120D and SIMATIC ET 200pro FC-2
374
Function Manual, 01/2017, FW V4.7 SP6, A5E34261271B AD







































































