





























Setting
up Compax3
C3I20T11 / C3I32T11
258
192-120103 N13 C3I20T11 / C3I32T11 December 2010
Non-linearities and their effects
In this chapter you can read about:
Attenuation of the excitation amplitude .......................................................................... 258
Shifting the working point into a linear range .................................................................. 259
Non-linearities in mechanical systems are for example due to friction, backlash or
position-dependent transmissions (cams and crankshaft drives). In general, the
frequency response is only defined for linear systems (see
7.2
(see on page 277)).
What happens in the frequency range in the event of a non-linear system, is shown
below.
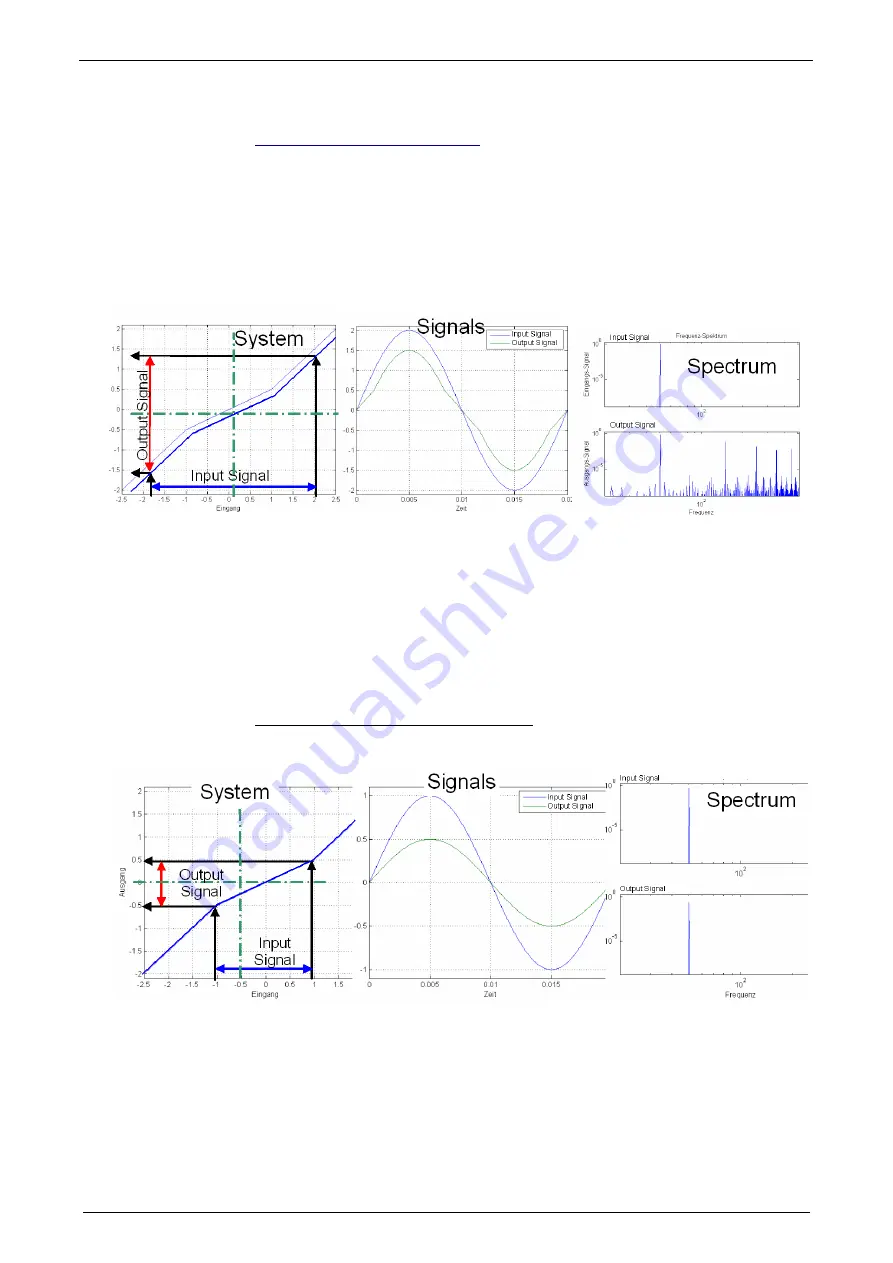
Signal amplitude too high => non-linearity in the signal range
Due to the non-linear transmission behavior of the system, many "new" frequencies
were generated in the output signal. In the frequency response, only one change of
the frequency present in the input signal can be displayed meaningfully.
=> The frequencies generated in the spectrum of the output signal lead to a
deterioration of the measured frequency response.
There are however two possibilities to make successful measurements of
frequency responses in spite of non-linearities present:
Attenuation of the excitation amplitude
Signal amplitude too small => no non-linearity in the signal range
The signal range is reduced so that approximately linear conditions are valid. The
results of the measurement will then display the dynamic behavior at the working
point.





















































