





























167
Learning Advanced Features
Code
Description
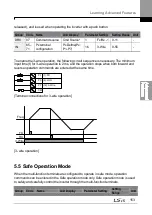
PID-24
PID Fdb Band
Sets the maximum and minimum value by adding or subtracting the
PID Fdb Band value (set at PID-24) from the reference value. When
the feedback value is between the maximum and minimum value, this
code maintains the PID output.
PID-25
PID P-Gain1
PID-32
PID P-Gain2
Set the output ratio for differences (errors) between the reference and
feedback. If the P Gain is set to 50%, then 50% of the error is output.
PID-26
PID I- Time 1
PID-33
PID I- Time 2
Sets the time to output accumulated errors. When the error is 100%,
the time taken for 100% output is set. When the integral time (PID I-
Time) is set to 1 second, 100% output occurs after 1 second of the
error remaining at 100%. Differences in a normal state can be
reduced by PID I Time. When the multi-function terminal block is set to
‗24 (I-Term Clear)‘ and is turned on, all of the accumulated errors are
deleted.
PID output (final frequency reference) is affected by the gains set at
PID-26, PID-33, and the Acc/Dec times to achieve the PID output
change based on the DRV-03 and DRV-04 settings. Therefore,
consider the relationship between these values when configuring the
gains and the Acc/Dec times.
PID-27
PID D-Time 1
PID-34
PID D-Time 2
Sets the output volume for the rate of change in errors. If the
differential time (PID D-Time) is set to 1 ms and the rate of change in
errors per sec is 100%, output occurs at 1% per 10 ms.
PID-28 PID FF-Gain
Sets the ratio that adds the target to the PID output. Adjusting this
value leads to a faster response.
PID-29
PID Out LPF
Used when the PID controller output changes too quickly or the entire
system is unstable, due to severe oscillation. In general, a lower value
(default value=0) is used to speed up response time, but in some
cases a higher value increases stability. The higher the value, the
more stable the PID controller output is, but the slower the response
time.
PID-30 PID Limit Hi,
PID-31 PID Limit Lo
Limit the output of the controller.
PID-35
PID Out Mode
Selects one of the PID output modes to modify the PID output.
Modifications can be made by adding input values and the main
operation frequency of the PID output to the final PID output value.
The following table lists the 4 modes that are available.
Setting
0
PID Output
Содержание LSLV0055H100-4COFN
Страница 14: ......
Страница 18: ...Preparing the Installation 4 37 90 kW 3 Phase ...
Страница 27: ...Preparing the Installation 13 ...
Страница 47: ...33 Installing the Inverter ...
Страница 48: ...Installing the Inverter 34 Input and Output Control Terminal Block Wiring Diagram ...
Страница 61: ...47 Installing the Inverter ...
Страница 71: ...Learning to Perform Basic Operations 57 ...
Страница 88: ...Learning to Perform Basic Operations 74 ...
Страница 103: ...89 Learning Basic Features Code Description V1 Quantizing ...
Страница 120: ...Learning Basic Features 106 Grou p Cod e Name LCD Display Parameter Setting Setting Range Unit Prev ...
Страница 129: ...115 Learning Basic Features ...
Страница 140: ...Learning Basic Features 126 ...
Страница 148: ...Learning Basic Features 134 ...
Страница 171: ...157 Learning Advanced Features Deceleration dwell operation ...
Страница 183: ...169 Learning Advanced Features ...
Страница 184: ...Learning Advanced Features 170 PID Command Block ...
Страница 185: ...171 Learning Advanced Features PID Feedback Block ...
Страница 186: ...Learning Advanced Features 172 PID Output Block ...
Страница 187: ...173 Learning Advanced Features PID Output Mode Block ...
Страница 197: ...183 Learning Advanced Features ...
Страница 201: ...187 Learning Advanced Features Code Description 100 EPID1 Control block ...
Страница 202: ...Learning Advanced Features 188 EPID2 Control block ...
Страница 237: ...223 Learning Advanced Features Time Period Schedule AP3 38 Except3 Day 01 01 ...
Страница 244: ...Learning Advanced Features 230 ...
Страница 259: ...245 Learning Advanced Features Code Description Code Description Volt ...
Страница 362: ...Learning Protection Features 348 ...
Страница 415: ...401 RS 485 Communication Features Item Standards Parity check None ...
Страница 524: ...Table of Functions 510 ...
Страница 533: ...Table of Functions 519 ...
Страница 547: ...533 Troubleshooting ...
Страница 564: ...Technical Specification 550 11 3 External Dimensions IP 20 Type 0 75 30 kW 3 phase 37 90 kW 3 phase ...
Страница 585: ...Technical Specification 571 ...
Страница 594: ...580 ...
Страница 595: ...581 ...
Страница 596: ...582 ...







































































