





























7.20 Safe Stop 2 (SS2)
The SS2 function is implemented according to EN 61800-5-2
The SS2 function allows a fast braking of the motor to zero speed and afterwards goes into SOS. In the case of an error
during deceleration, the SOS state cannot be reached.
Because the position control stays active, the normal operation can be immediately continued without homing if the safe
function is deactivated. This ensures short down and set-up times and as well high productivity.
The activation can be done by safe digital IO’s or a safe field bus (configurable).
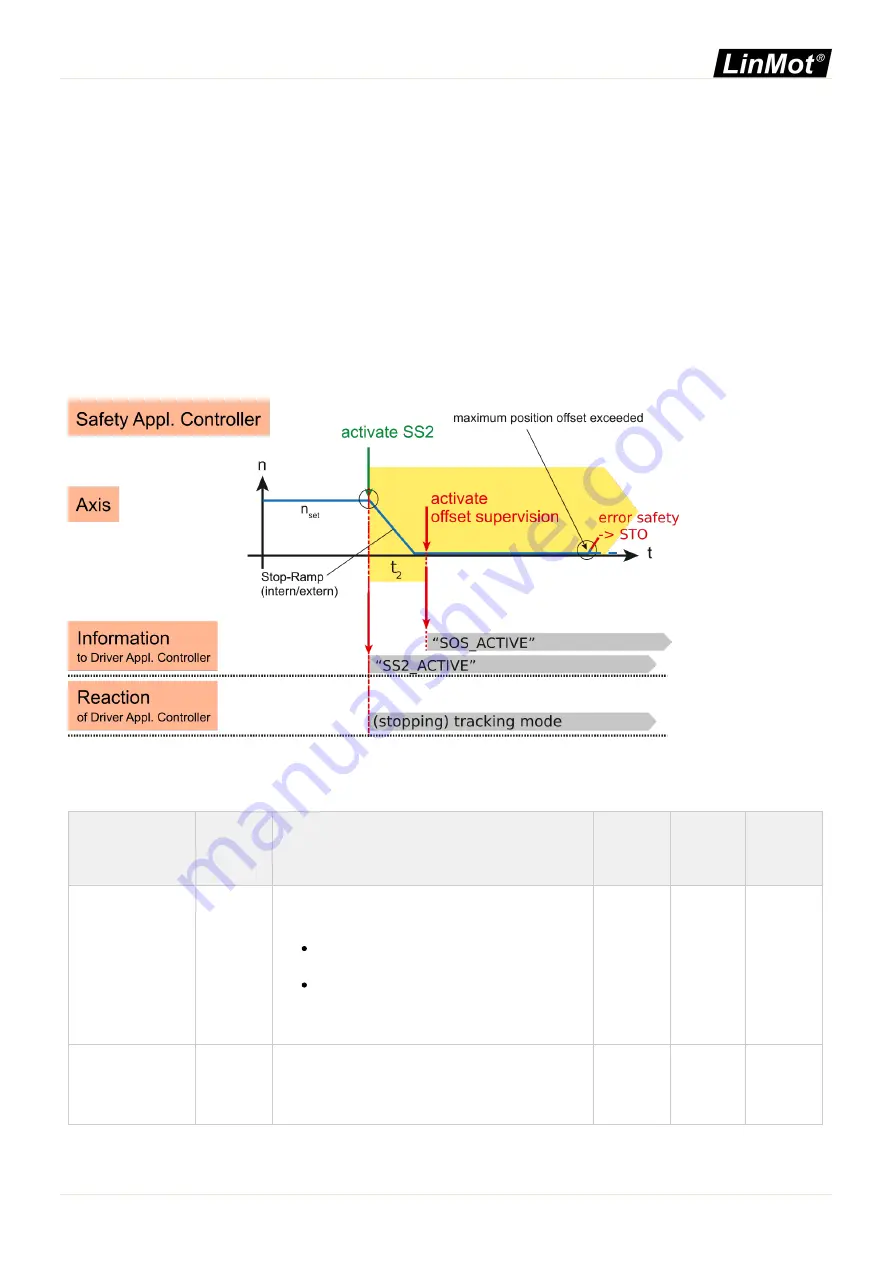
In the “Safe Stop 2” state the drive reduces the speed to zero as SS1, but in contrast to SS1 the motor is not switched
off.
The SS2 can only be realized with safe position encoders.
One instance of SS2 is implemented.
Figure 29: SS2 Timing
7.20.1 Parameters
Name
UPID
Type
Unit
Description
Min
Max
Typical
SS2 Stop Source
47E4h
UInt8
Specifies if the stop is generated in the drive or by the
external setpoint generator.
01h: Internal Abort (default): With this selection the
drive itself initiates the stop function (Quick Stop)
02h: External Stop: With this selection the stop
has to be done by the external setpoint generator
(PLC).
-
-
Internal
Abort
Stop Ramp Down
Time
(t2 in figure)
47E7h
UInt16
1 ms
The stop ramp down time starts, when SS2 is activated.
Ramp down is active.
The ramp down is not supervised.
After this time SOS becomes active.
2 ms
60 s
0.5 s
Table 83: SS2 Parameters
2S Drive Systems / 0185-1174_E_1V1_SM_C1251-2S / NTI AG
0185-1174_E_1V1_SM_C1251-2S / 2021-11-26 16:43 (Rev. 12500)
Page 123 of 150







































































