




























Optidrive P2 Advanced User Guide Rev 2.00
14
www.invertekdrives.com
Opt
idr
ive
P2
Par
ame
ter
Se
t
Ov
er
view
1
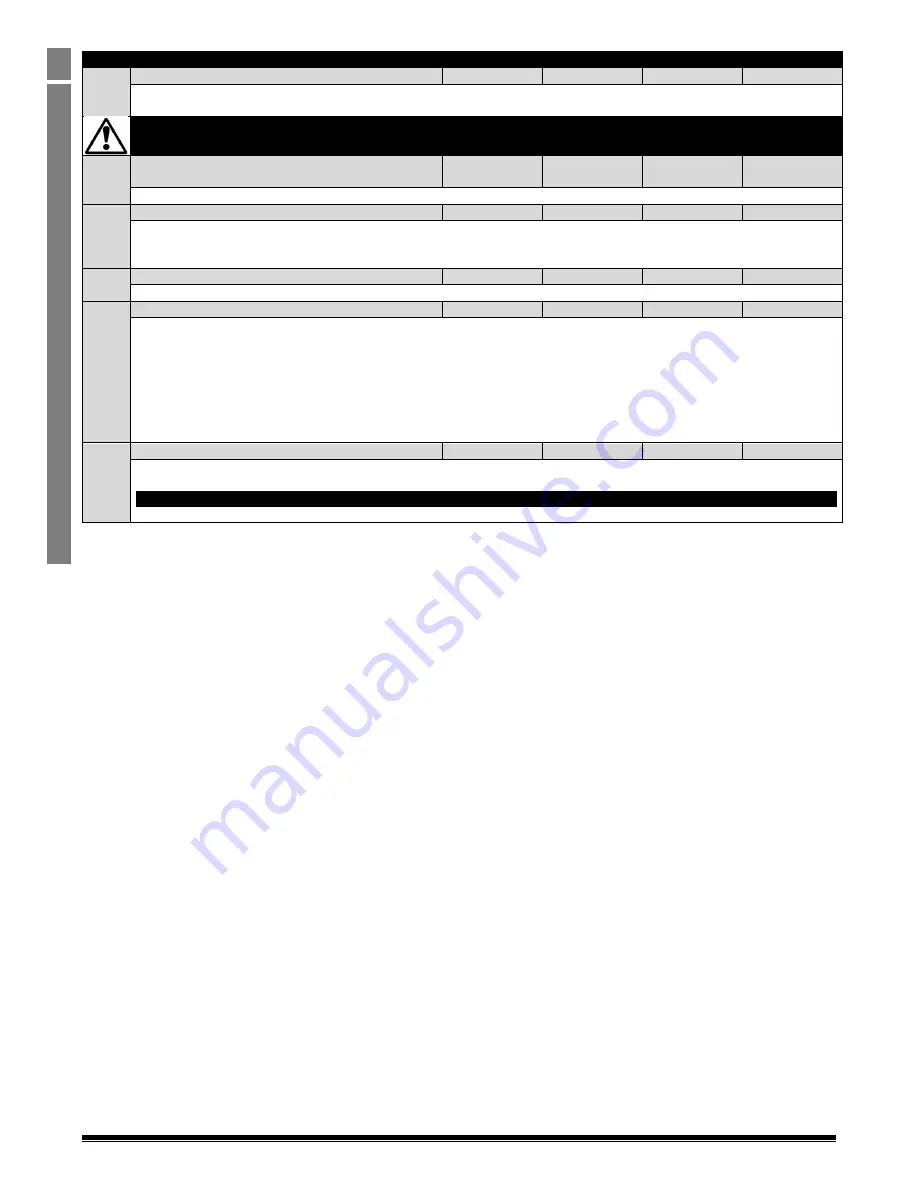
Par.
Name
Minimum
Maximum
Default
Units
P4-08
Minimum Motoring Torque Limit
0.0
P4-07
0.0
%
Active only in Vector Speed or Vector Torque motor control modes (P4-01 = 0 or 1). Sets a minimum torque limit, whereby the when
the Optidrive is enabled, it will always attempt to maintain this torque on the motor at all times whilst operating.
NOTE : This parameter should be used with extreme care, as the drive output frequency will increase to achieve the torque level,
and may exceed the selected speed reference
P4-09
Generator Mode Maximum Torque Limit (Maximum
Regenerative Torque)
0.0
500.0
100.0
%
Active only in Vector Speed or Vector Torque motor control modes. Sets the maximum regenerating torque allowed by the Optidrive
P4-10
V/F Characteristic Adjustment Frequency
0.0
100.0
0.0
%
Entered as a percentage value of P1-09.
When operating in V/F mode (P4-01 = 2), this parameter in conjunction with P4-11 sets a frequency point at which the voltage set in
P4-11 is applied to the motor. Care must be taken to avoid overheating and damaging the motor when using this feature.
P4-11
V/F Characteristic Adjustment Voltage
0.0
100.0
0.0
%
Entered as a percentage of P1-07. Used in conjunction with parameter P4-10
P4-12
Motor Thermal Memory Retention
0
1
0
-
0 : Disabled.
The present value of the motor overload accumulator is not stored during power off.
1 : Enabled.
The value of the motor thermal overload accumulator is stored during power off.
Whilst the motor is being operated, the drive continuously monitors the output current over a time period, to determine the likely
operating temperature of the motor. If the motor operates at high current for a period of time, the drive may trip to protect the motor
and prevent damage. When this function is disabled (default setting), removing the power supply from the drive will result in the
thermal overload value for the motor being reset to zero, hence the motor could potentially be operated and damaged. By enabling
this parameter, even if the mains power is removed from the drive, the value is retained, and reused at the next power on, in order to
avoid the risk of damage to the motor.
P4-13
Output Phase Sequence
0
1
0
-
0 : U, V, W.
1 : U, W, V.
Direction of motor rotation when operating in a forward direction will be reversed.
Note:
When an encoder is used, it may be necessary to reverse the encoder connections for correct operation if this parameter is changed.






































































