





























Chapter 4 Explanation of Functions
4 - 60
4.2.55 P/PI switching function (PPI)
The P/PI switching function allows you to switch the control
(compensation) mode of the speed control system between the
proportional integrated compensation and proportional
compensation modes when the V/F characteristic curve selection
is the sensorless vector control.
To use this function, assign function "43" (PPI: P/PI mode
selection) to one of the terminal [1] to [8] functions (C001 to C008).
When the PPI terminal is turned off, the proportional integrated compensation mode is selected. When the
PPI terminal is turned on, the proportional compensation mode is selected.
If function "43" (PPI: P/PI mode selection) is not assigned to any intelligent input terminal, the proportional
integrated compensation mode is selected.
Item
Function code
Data or range of data
Description
V/F characteristic curve
selection, 1st/2nd/3rd motors
A044/A244 03
Sensorless vector control (not available
for "A344")
Terminal function
C001 to C008
43
PPI: P/PI mode selection
Motor speed constant, 1st/2nd
motors
H005/H205
0.001 to 80.000
PI proportional gain
H050/H250
0.0 to 999.9, 1000 (%)
PI integral gain
H051/H251
0.0 to 999.9, 1000 (%)
P proportional gain
H052/H252
0.001 to 10.00
Terminal selection PI
proportional gain setting
H070
0.0 to 999.9, 1000 (%)
The speed control normally incorporates the proportional integrated
compensation (PI control), and the motor speed is controlled so that
the difference between the frequency specified by the frequency
command and the actual motor speed is zero. However, a specific
operation mode (called drooping operation), in which one load is
driven by multiple motors, sometimes requires the proportional
control (P control). To enable the proportional (P) control mode,
assign function "43" (P/PI switching function) to one of the terminal
[1] to [8] functions (C001 to C008), and turn on the intelligent input
terminal. For the proportional control, set the value of the P control
proportional gain (H052) as the KPP value.
The following formula generally represents the relation between the
KPP value and momentary speed variation:
(Momentary speed variation) = (%)
The following formula generally represents the relation between the momentary speed variation and speed error:
(Momentary speed variation) =
×
100%
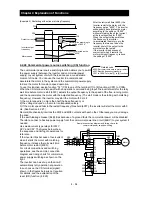
P control mode
PI control mode
100%
0
Torque
(A)
Rotation speed
10
(Set value of KPP)
Speed error at rated torque (A)
Synchronous rotation speed at base frequency
A044/A244: V/F characteristic curve selection, 1st/2nd
motors
C001 to C008: Terminal [1] to [8] functions
H005/H205: Motor speed constant, 1st/2nd motors
H050/H250: PI proportional gain, 1st/2nd motors
H051/H251: PI integral gain, 1st/2nd motors
H052/H252: P proportional gain setting, 1st/2nd motors
Related code
Содержание L700 Series
Страница 16: ... Memo ...
Страница 20: ... Memo ...
Страница 22: ... Memo ...
Страница 46: ... Memo ...
Страница 60: ... Memo ...
Страница 62: ... Memo ...
Страница 212: ... Memo ...
Страница 222: ... Memo ...
Страница 224: ... Memo ...
Страница 232: ... Memo ...
Страница 237: ...Chapter 7 Specifications 7 5 L700 300 LFF HFF L700 450 550 LFF HFF 750 HFF 5 Cable hole φ25 5 Cable hole φ41 ...
Страница 238: ...Chapter 7 Specifications 7 6 L700 750 LFF 6 Cable hole φ41 ...
Страница 239: ...Chapter 7 Specifications 7 7 L700 900 to 1100HFF L700 1320 to 1600HFF ...
Страница 240: ... Memo ...
Страница 242: ... Memo ...
Страница 258: ... Memo ...