























PCL 600
Operators Manual
v 2.0
60
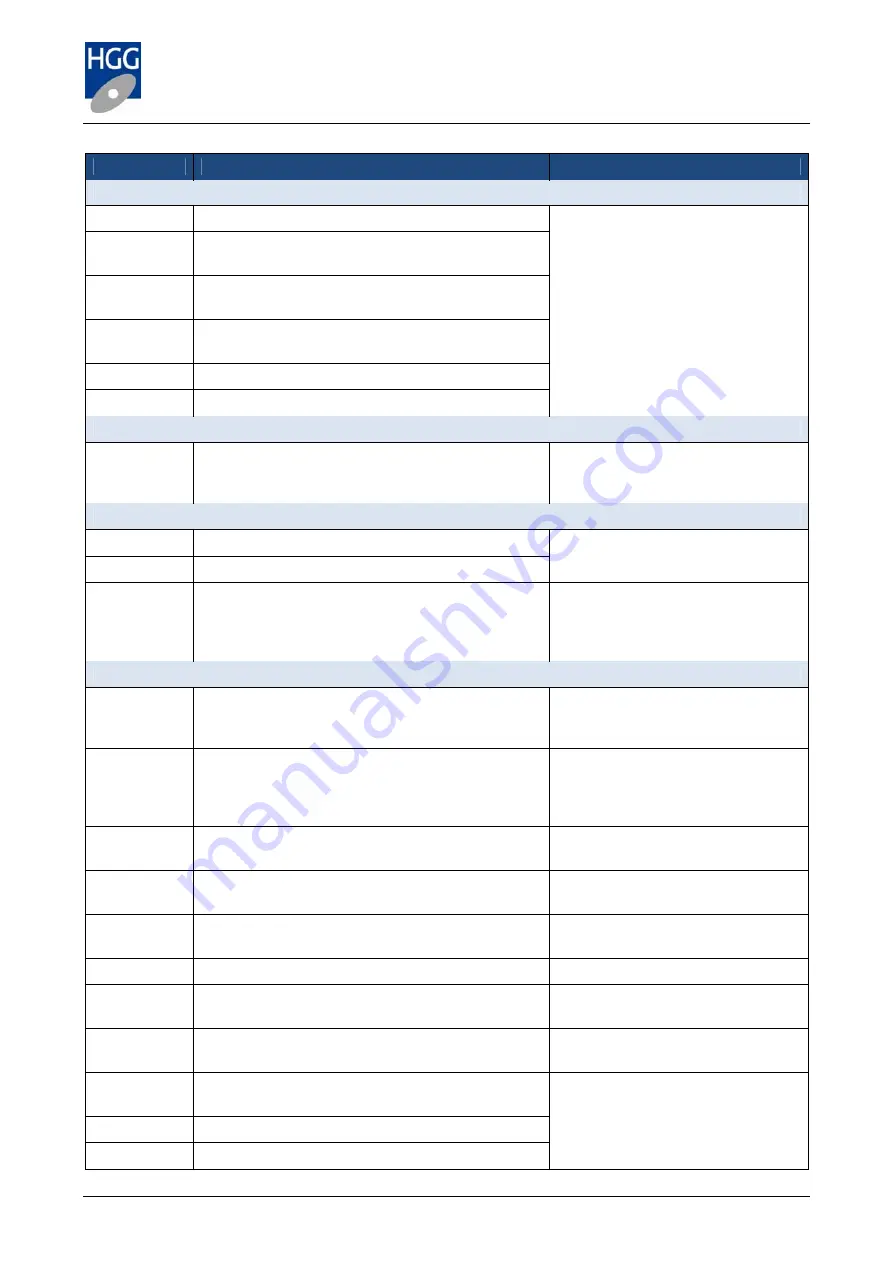
Error number
Error text
Problem/Reference chapter
Max Controller
003:001:315
Error starting spline (motion controller: <named>).
These are software problems with
the Max controller, usually you will
have received other error messages
prior to one of these. If the problem
could not be solved and one of
these messages continues, contact
HGG.
003:001:316
Error preparing start spline (motion controller:
<named>).
003:001:317
Gearing of axes failed (motion controller:
<named>)
003:001:318
Ungearing of axes failed (motion controller:
<named>)
003:001:319
Geared axes. master: <named>; slave: <named>.
003:001:320
Ungeared axes. master: <named> slave: <named>
Axes
003:002:001 Merged
softlimits
of slave axes <named> and
master axis <named>: neg.: <number>, pos.:
<number>
This is a software problem caused
by overlapping axes in the
configuration, contact HGG.
Calculator
003:008:003
Calculation did not respond.
There is a problem with the
calculation module, contact HGG.
003:008:004
Calculation failure: <named error>
003:008:009
Starting calculation failed. Calculation still running.
Wait for the current calculation to be
completed, try again. Disable the
macro calculator in the settings.
Enable and try again.
Staubli robot
003:010:009
CMND error
Error sending command to robot.
Check if the robot software is
running, try again.
003:010:010
Send And Receive error
Check the MCP pendant, is the
robot software still running? Set the
robot in high power and try again.
Check the network connections.
003:010:012
Robot Hold failed
Check the robot connection. Check
the MCP pendant.
003:010:014
Moving robot to safe failed because robot is in
service position
Press the service button again to
move the robot to the safe position.
003:010:015
Moving robot to safe failed
Move the robot manually a small
amount and try again.
003:010:016
Moving robot to lift failed
Move the robot to safe.
003:010:017
Moving robot to pos failed
The robot has not moved into
position. Move to safe, try again.
003:010:019
Error sending Staubli tool
Move the robot to safe. The robot
tool will be re-sent.
003:010:022
Could not connect to Staubli at ip <IP
addres>:<portNumber>
Check the MCP pendant, is the
robot software still running? Set the
robot in high power. Check network
connections.
003:010:023
Staubli not in high power
003:010:027 Staubli
disconnected.
































































