





























Maintenance 9. Joint #5
C8 Rev.13
287
9.3 Joint #5 - Replacing the Timing Belt
Name
Qty.
Note
Maintenance
Parts
Joint #5 timing belt
330 mm
1
1655932
Belt tensile jig
1
1674582
Tools
Hexagonal wrench
(width across flats: 3 mm)
1
For M4 hexagon socket head cap bolts
Cross-point screwdriver (#2)
1
For cross recessed head screws
Torque wrench
1
For tightening torque control
Belt tension meter
1
Refer: Unitta U-505
* The belt tensile jig is an assembly jig. Use the jig when adjusting belt tension.
The brake is mounted on each joint to prevent the arm from lowering due to its own weight while the
Controller power is OFF or the motor is OFF status. The brake does not work during replacement.
Be careful when performing maintenance work.
Removal: Joint #5 Timing belt
1.
Turn OFF the Controller power.
2.
Remove the Arm #4 side cover.
For details, refer to
Maintenance: 3. Covers
.
3.
Loosen the Joint #5 motor unit set screws.
Hexagon socket head cap bolts: 2-M4×15
(with a plain washer)
4.
Remove the Joint #5 timing belt.
Installation: Joint #5 Timing belt.
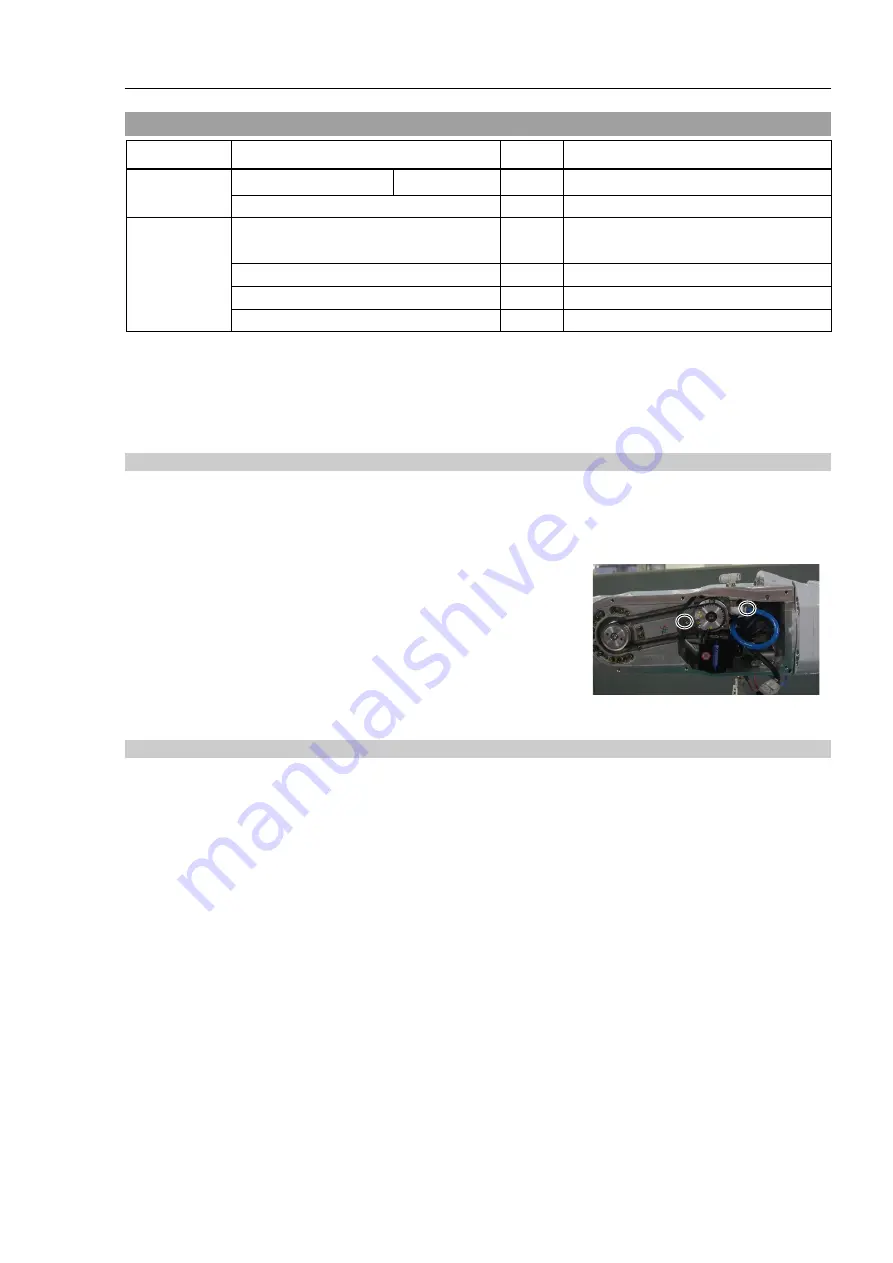
1.
Pass the Joint #5 timing belt around the pulley 1 and the pulley 2 of the Joint #5.
2.
Secure the Joint #5 motor unit.
For details, refer to
Maintenance: 9.1 Joint #5 – Replacing the Motor
, Installation steps (5) to (6) and (11)
to (12).
Содержание C8 Series
Страница 1: ...Rev 13 EM208R4413F 6 Axis Robots C8 series MANIPULATOR MANUAL ...
Страница 2: ...Manipulator manual C8 series Rev 13 ...
Страница 8: ...vi C8 Rev 13 ...
Страница 14: ...Table of Contents xii C8 Rev 13 ...
Страница 16: ......
Страница 31: ...Setup Operation 2 Specifications C8 Rev 13 17 2 4 Outer Dimensions Unit mm 2 4 1 C8 A701 C8 ...
Страница 32: ...Setup Operation 2 Specifications 18 C8 Rev 13 2 4 2 C8 A901 C8L ...
Страница 33: ...Setup Operation 2 Specifications C8 Rev 13 19 2 4 3 C8 A1401 C8XL ...
Страница 49: ...Setup Operation 3 Environment and Installation C8 Rev 13 35 C8 A901 C8L ...
Страница 97: ...Maintenance This volume contains maintenance procedures with safety precautions for C8 series Manipulators ...
Страница 98: ......
Страница 183: ...Maintenance 4 Cable Unit C8 Rev 13 169 4 2 Connector Pin Assignment 4 2 1 Signal Cable ...
Страница 184: ...Maintenance 4 Cable Unit 170 C8 Rev 13 ...
Страница 185: ...Maintenance 4 Cable Unit C8 Rev 13 171 ...
Страница 186: ...Maintenance 4 Cable Unit 172 C8 Rev 13 4 2 2 Power Cable C8 A701 C8 C8 A901 C8L ...
Страница 187: ...Maintenance 4 Cable Unit C8 Rev 13 173 C8 A1401 C8XL ...
Страница 188: ...Maintenance 4 Cable Unit 174 C8 Rev 13 C8 A701 C8 C8 A901 C8L C8 A1401 C8XL ...







































































