


























Setup & Operation 4. End Effectors
C8 Rev.13
55
Eccentric Quantity and the INERTIA Setting
CAUTION
■
The eccentric quantity of the load (weight of the end effector and work piece) must
be 300 mm or less. The C8 series Manipulators are not designed to work with
eccentric quantity exceeding 300 mm.
Always set the eccentric quantity parameter according to the eccentric quantity.
Setting a value that is smaller than the actual eccentric quantity may cause errors,
excessive shock, insufficient function of the Manipulator, and/or shorten the life
cycle of parts/mechanisms.
The acceptable eccentric quantity of the load for C8 series Manipulators is 50 mm at nominal
rating and 300 mm at maximum. When the eccentric quantity of the load exceeds the
rating, change the setting of eccentric quantity parameter using the INERTIA command.
After changing the setting, the maximum acceleration/deceleration speed of Manipulator
corresponding to “eccentric quantity” is set automatically.
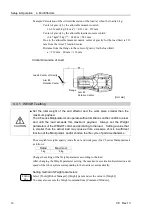
Position of Load’s Center of Gravity
Rotation Center
a, b = Eccentric Quantity
(300 mm or less)
Flange
a
b
To set the parameter, enter
the larger value of “a” or “b”.
Eccentric Quantity
Eccentric quantity of load on Arm #6
The eccentric quantity of the load (weight of the end effector and work piece) on the Arm
#6 can be set by the “eccentric quantity” parameter of the INERTIA command.
Enter the larger value of either “a” or “b” in the figure above to [Eccentricity].
EPSON
RC+
Select [Tools]–[Robot Manager]-[Inertia] panel and enter the value into [Eccentricity:].
You may also execute the Inertia command from [Command Window].
Содержание C8 Series
Страница 1: ...Rev 13 EM208R4413F 6 Axis Robots C8 series MANIPULATOR MANUAL ...
Страница 2: ...Manipulator manual C8 series Rev 13 ...
Страница 8: ...vi C8 Rev 13 ...
Страница 14: ...Table of Contents xii C8 Rev 13 ...
Страница 16: ......
Страница 31: ...Setup Operation 2 Specifications C8 Rev 13 17 2 4 Outer Dimensions Unit mm 2 4 1 C8 A701 C8 ...
Страница 32: ...Setup Operation 2 Specifications 18 C8 Rev 13 2 4 2 C8 A901 C8L ...
Страница 33: ...Setup Operation 2 Specifications C8 Rev 13 19 2 4 3 C8 A1401 C8XL ...
Страница 49: ...Setup Operation 3 Environment and Installation C8 Rev 13 35 C8 A901 C8L ...
Страница 97: ...Maintenance This volume contains maintenance procedures with safety precautions for C8 series Manipulators ...
Страница 98: ......
Страница 183: ...Maintenance 4 Cable Unit C8 Rev 13 169 4 2 Connector Pin Assignment 4 2 1 Signal Cable ...
Страница 184: ...Maintenance 4 Cable Unit 170 C8 Rev 13 ...
Страница 185: ...Maintenance 4 Cable Unit C8 Rev 13 171 ...
Страница 186: ...Maintenance 4 Cable Unit 172 C8 Rev 13 4 2 2 Power Cable C8 A701 C8 C8 A901 C8L ...
Страница 187: ...Maintenance 4 Cable Unit C8 Rev 13 173 C8 A1401 C8XL ...
Страница 188: ...Maintenance 4 Cable Unit 174 C8 Rev 13 C8 A701 C8 C8 A901 C8L C8 A1401 C8XL ...







































































