



























Setup & Operation 5. Motion Range
C8 Rev.13
71
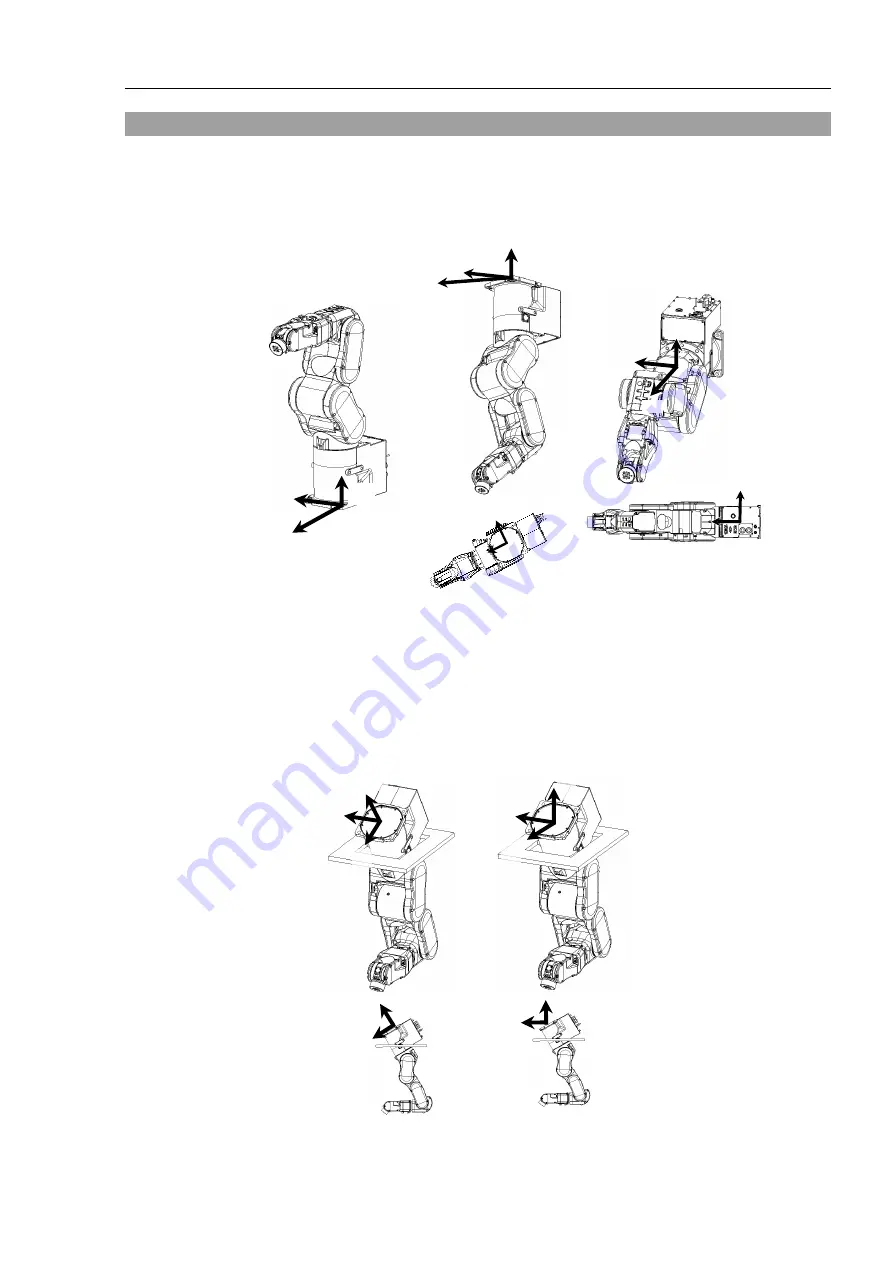
5.4 Coordinate System
The origin point is where the Manipulator’s installation face intersects with the rotation axis
of Joint #1.
For details on the coordinate system, refer to the
EPSON RC+ Users Guide manual
.
Table Top mounting
Ceiling mounting
Wall mounting
+Z
+X
+Y
+Z
+X
+Y
+X
+Y
+Z
+X
+X
+Y
+Y
BASE setting is suitable for install the robot obliquely.
BASE setting can change a specific coordinate system of the robot and match the World
coordinate system of the Jog & Teach and the coordinate system of the equipment.
For procedure of the BASE setting, refer to
SPEL+ Language Reference: BASE Command.
With BASE setting
Without BASE setting
+Z
+X
+Y
+Z
+Y
+Z
+X
+Y
+Z
+Y
Содержание C8 Series
Страница 1: ...Rev 13 EM208R4413F 6 Axis Robots C8 series MANIPULATOR MANUAL ...
Страница 2: ...Manipulator manual C8 series Rev 13 ...
Страница 8: ...vi C8 Rev 13 ...
Страница 14: ...Table of Contents xii C8 Rev 13 ...
Страница 16: ......
Страница 31: ...Setup Operation 2 Specifications C8 Rev 13 17 2 4 Outer Dimensions Unit mm 2 4 1 C8 A701 C8 ...
Страница 32: ...Setup Operation 2 Specifications 18 C8 Rev 13 2 4 2 C8 A901 C8L ...
Страница 33: ...Setup Operation 2 Specifications C8 Rev 13 19 2 4 3 C8 A1401 C8XL ...
Страница 49: ...Setup Operation 3 Environment and Installation C8 Rev 13 35 C8 A901 C8L ...
Страница 97: ...Maintenance This volume contains maintenance procedures with safety precautions for C8 series Manipulators ...
Страница 98: ......
Страница 183: ...Maintenance 4 Cable Unit C8 Rev 13 169 4 2 Connector Pin Assignment 4 2 1 Signal Cable ...
Страница 184: ...Maintenance 4 Cable Unit 170 C8 Rev 13 ...
Страница 185: ...Maintenance 4 Cable Unit C8 Rev 13 171 ...
Страница 186: ...Maintenance 4 Cable Unit 172 C8 Rev 13 4 2 2 Power Cable C8 A701 C8 C8 A901 C8L ...
Страница 187: ...Maintenance 4 Cable Unit C8 Rev 13 173 C8 A1401 C8XL ...
Страница 188: ...Maintenance 4 Cable Unit 174 C8 Rev 13 C8 A701 C8 C8 A901 C8L C8 A1401 C8XL ...






























































