





























Delta SCARA Robot System User Manual
SCARA CE Series
103
Figure7. 1 Power control box interface peripheral combination
7.2 Introduction to the controller interface
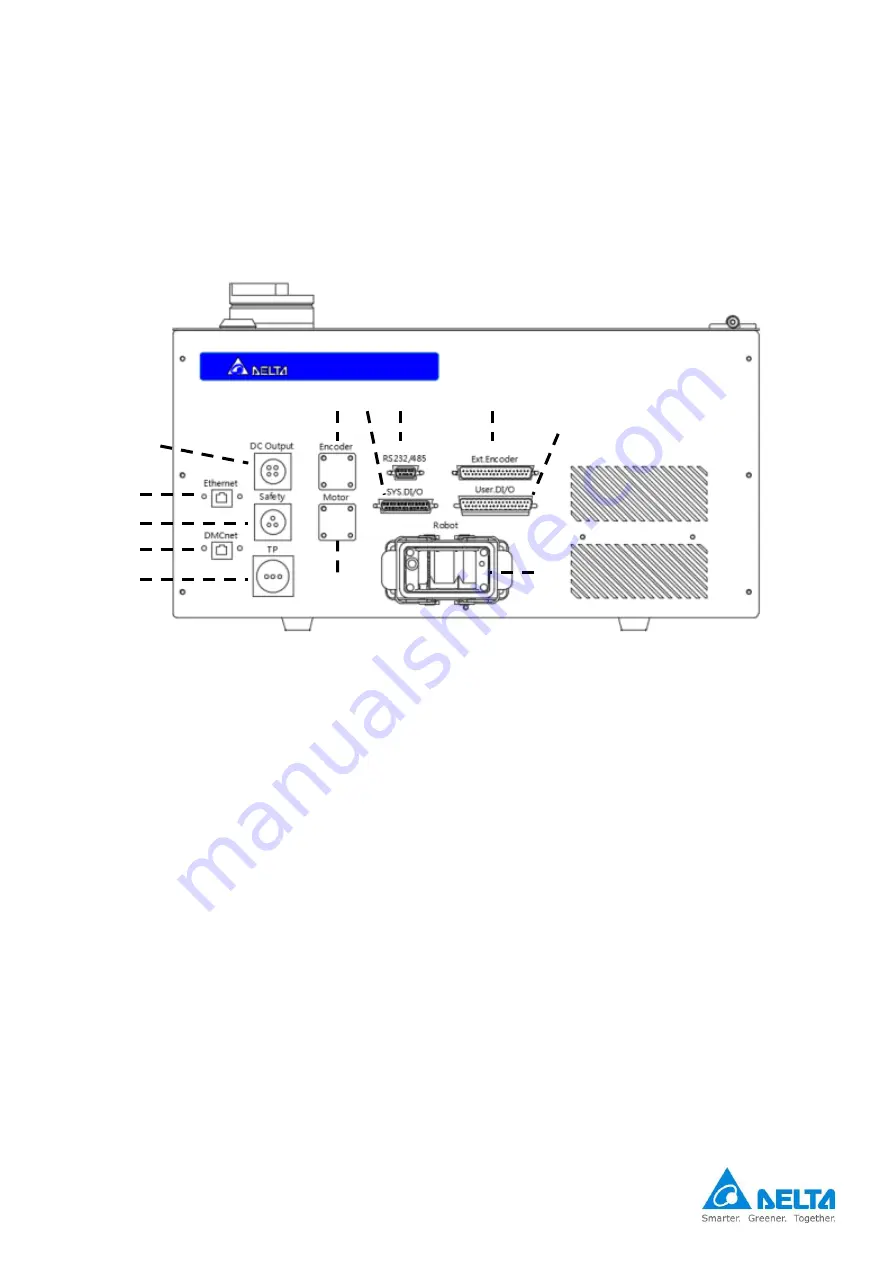
Figure 7.2 below is the DCS power control box interface; the following are individual explanations of the
controller interface, explaining the function of the interface and the wiring.
Figure7. 2 DCS robot control box connection definitions
1.
EtherNet communication port.
2.
DMCnet communication port.
3.
Direct current output connector: Provides customers with DC24V (2A) for external connection.
4.
Teach pendant connector: Location to connect handheld teach pendants (DTS).
5.
Safety connector: Signal connector provided for customers to connect external safety protections.
6.
External shaft motor connection (optional): Power connector for the fifth axle motor.
7.
External shaft encoder connection (optional): Encoder connector for the fifth axle motor.
8.
Serial communication connector: RS-232/RS485 communication connector.
9.
System output input connector: System I/O; provides customers with defined system input points
and output points for external connections.
10.
External encoder connector: Allows customers to connect and use 1 external encoder.
11.
User output input connector: User I/O; a total of 24 sets of DI and 12 sets of DO.
12.
Robot connector: Connects the motor and between the robot and the power control box, and the
encoder cable signal.
1
2
3
5
6
7
4
8
9
10
11
12
Содержание DRS40L3SOADF003
Страница 1: ...Delta SCARA Robot System User Manual SCARA CE Series 1 ...
Страница 59: ...Delta SCARA Robot System User Manual SCARA CE Series 59 ...
Страница 64: ...Delta SCARA Robot System User Manual SCARA CE Series 64 Figure4 5 DRS70L series dimensions figure ...
Страница 113: ...Delta SCARA Robot System User Manual SCARA CE Series 113 ...
Страница 115: ...Delta SCARA Robot System User Manual SCARA CE Series 115 ...
Страница 129: ...Delta SCARA Robot System User Manual SCARA CE Series 129 ...







































































