





























Available third-party motor
Planned third-party motor
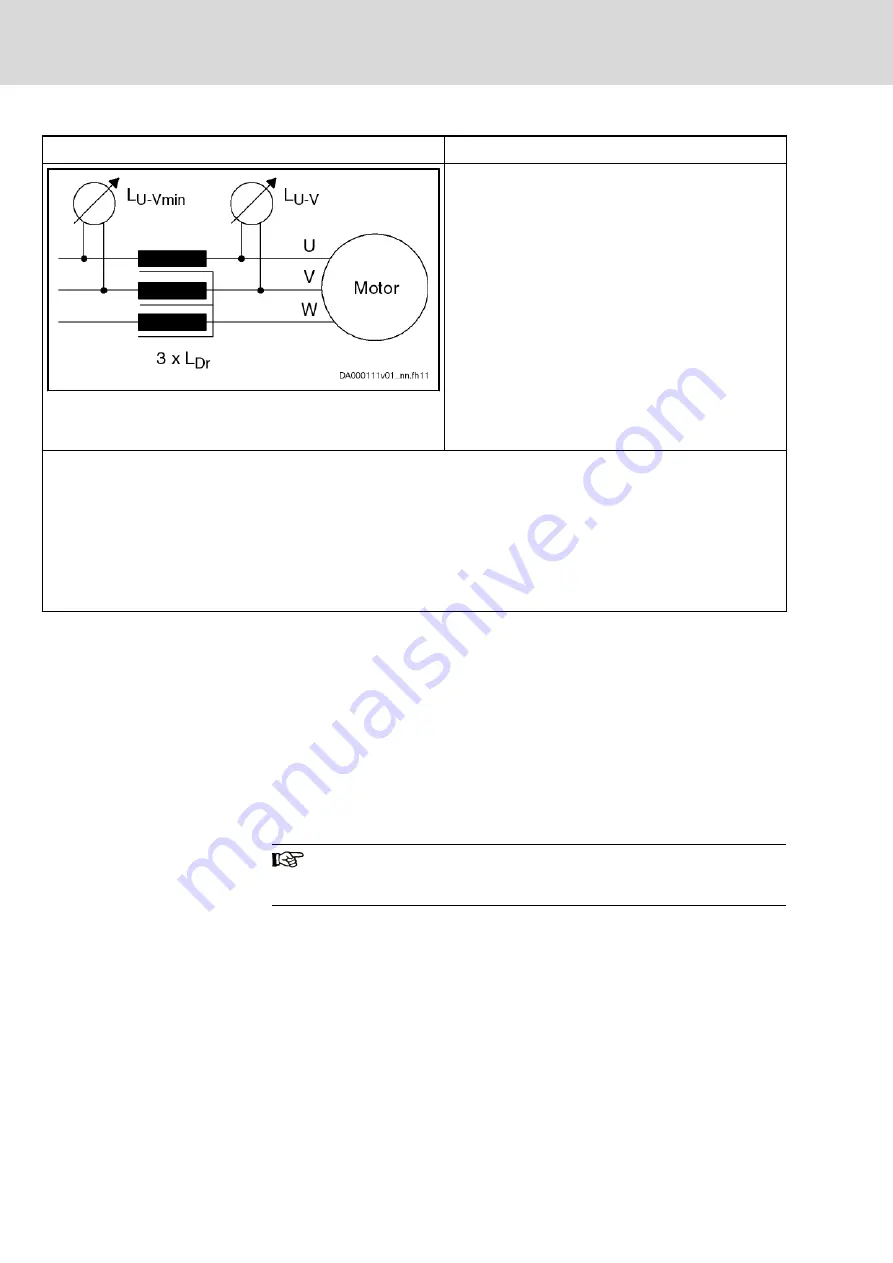
L
Dr
=
0.5 × (L
U-Vmin
- L
U-V
) (inductance measurement
with 1 kHz)
Fig. 4-2:
Mounting 3x L
Dr
(three-phase choke)
Calculate the leakage inductance (asynchronous mo‐
tor) or inductance (synchronous motor) of the third-par‐
ty motor using the single-phase equivalent circuit dia‐
gram (manufacturer's specification).
Calculate the choke, if necessary.
It is recommended to contact Rexroth.
Choke requirements:
●
I
n_Dr
≥ I
n_Mot
The rated current of the choke has to be greater than or equal to the rated motor current.
●
Depending on the maximum speed, the choke is loaded with the appropriate output frequency and the PWM frequen‐
cy of the drive controller.
●
The insulation class has to correspond at least to that of the motor or has to be sized for higher temperatures.
●
The voltage load of the choke depends on the drive controller used.
Tab. 4-2:
Data for any required choke
Third-party motor temperature evaluation
Only operate motors with a built-in temperature sensor on Rexroth IndraDrive
ML drive controllers so that the motor can be thermally monitored by the drive
controller and protected from being damaged from excess temperature in‐
crease (see "P‑0‑0512, Temperature sensor").
If you want to operate third-party motors without a temperature sensor on
Rexroth IndraDrive ML drive controllers in exceptional instances, you have to
determine the thermal time constants of the motor housing (P‑0‑4035) and
motor winding (P‑0‑4034, P‑0‑4037). The firmware can correctly reflect the
cooling situation of the motor using its temperature model.
A dirty motor housing or fan impairs the cooling situation of the
motor and the motor is not sufficiently protected against thermal
overload.
Third-party motor encoder requirements
Third-party asynchronous motor encoder
Asynchronous motors can also be controlled by Rexroth IndraDrive ML drive
controllers in "open-loop" operation (without motor encoder). In "closed-loop"
operation (with motor encoder), a relative measuring system is sufficient for
asynchronous motors.
Third-party synchronous motor encoder
For fail-safe drives with synchronous third-party motors on
Rexroth IndraDrive ML drive controllers, the following potential combinations
or restrictions have to be considered when selecting the measuring system:
Bosch Rexroth AG
DOK-INDRV*-HXX05******-PR02-EN-P
50/407
Rexroth IndraDrive ML Drive Systems with HMU05
Combining the individual components
Содержание Rexroth HMU05.1N Series
Страница 1: ...Rexroth IndraDrive ML Drive Systems with HMU05 Project Planning Manual R911344279 Edition 02 ...
Страница 12: ...Bosch Rexroth AG DOK INDRV HXX05 PR02 EN P X 407 Rexroth IndraDrive ML Drive Systems with HMU05 ...
Страница 32: ...Bosch Rexroth AG DOK INDRV HXX05 PR02 EN P 30 407 Rexroth IndraDrive ML Drive Systems with HMU05 ...
Страница 46: ...Bosch Rexroth AG DOK INDRV HXX05 PR02 EN P 44 407 Rexroth IndraDrive ML Drive Systems with HMU05 ...
Страница 124: ...Bosch Rexroth AG DOK INDRV HXX05 PR02 EN P 122 407 Rexroth IndraDrive ML Drive Systems with HMU05 ...
Страница 138: ...Bosch Rexroth AG DOK INDRV HXX05 PR02 EN P 136 407 Rexroth IndraDrive ML Drive Systems with HMU05 ...
Страница 366: ...Bosch Rexroth AG DOK INDRV HXX05 PR02 EN P 364 407 Rexroth IndraDrive ML Drive Systems with HMU05 ...
Страница 370: ...Bosch Rexroth AG DOK INDRV HXX05 PR02 EN P 368 407 Rexroth IndraDrive ML Drive Systems with HMU05 ...
Страница 409: ...Notes DOK INDRV HXX05 PR02 EN P Bosch Rexroth AG 407 407 Rexroth IndraDrive ML Drive Systems with HMU05 ...







































































