





























YASKAWA
TOEPC710616134G AC Drive L1000A Technical Manual Addendum
47
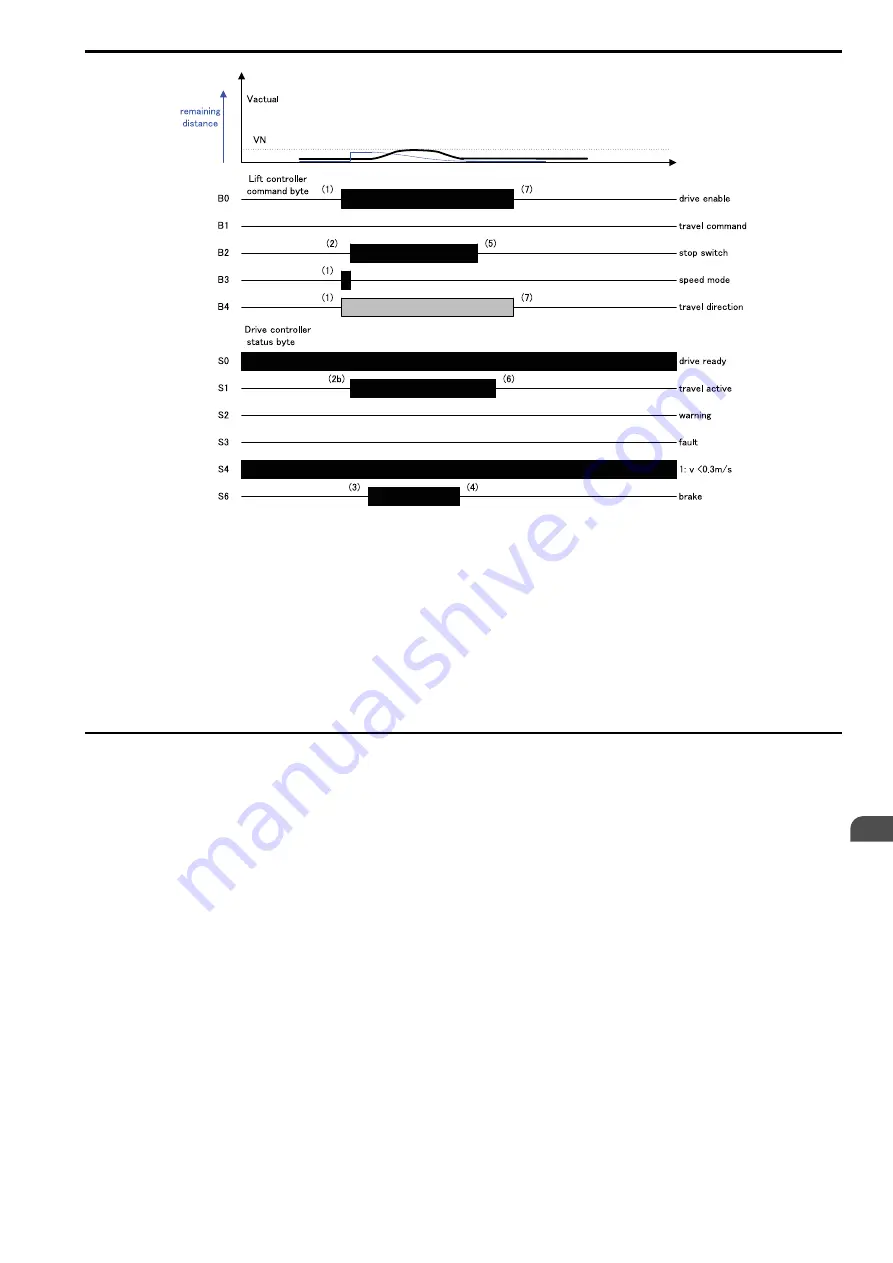
Figure 6.15 VN' Re-leveling Travel (DCP4)
■
Crawl Travel in DCP4
There is no definition of a crawl travel sequence in DCP4. The lift controller chooses one of the described travel
sequences dependent on the remaining distance.
Exception:
•
If the remaining distance at start is less than 20 cm, the drive controller limits the maximum speed to crawl
speed.
•
The inspection and rescue travels are independent of the DCP3 and DCP4 modes. In this case, the speed is
limited to crawl speed when the lift levels at the end stop.
◆
DCP Fast-Start Function
The 'Fast-Start Function' allows magnetizing the motor already when the doors are closing and holding the lift car
with opened brake in the level position. This function can be used with DCP3 and DCP4. If the 'Fast-Start
Function' is active and the doors are completely closed, the car can immediately start moving without losing time
for magnetizing the motor and opening the brakes.
Note:
Some additional wirings and shaft signals are necessary to meet the requirements of the EN81-1.
■
Start Sequence
The following figure shows the start sequence for DCP3 and DCP4.
EN
Summary of Contents for L1000A CIMR-LC F Series
Page 1: ...AC Drive L1000A For Lift Applications Technical Manual Addendum Type CIMR LCxFxxxxxxx 913x Web...
Page 98: ...15 Appendix 98 YASKAWA TOEPC710616134G AC Drive L1000A Technical Manual Addendum...
Page 99: ...15 Appendix YASKAWA TOEPC710616134G AC Drive L1000A Technical Manual Addendum 99 EN...
Page 100: ...15 Appendix 100 YASKAWA TOEPC710616134G AC Drive L1000A Technical Manual Addendum...
Page 101: ...15 Appendix YASKAWA TOEPC710616134G AC Drive L1000A Technical Manual Addendum 101 EN...
Page 102: ...15 Appendix 102 YASKAWA TOEPC710616134G AC Drive L1000A Technical Manual Addendum...







































































