





























X5 AC Drive User’s Manual
Chapter 2: Technical Characteristics
DPD00089A
-
19 -
© 2009 Vacon Incorporated All Rights Reserved
2.5
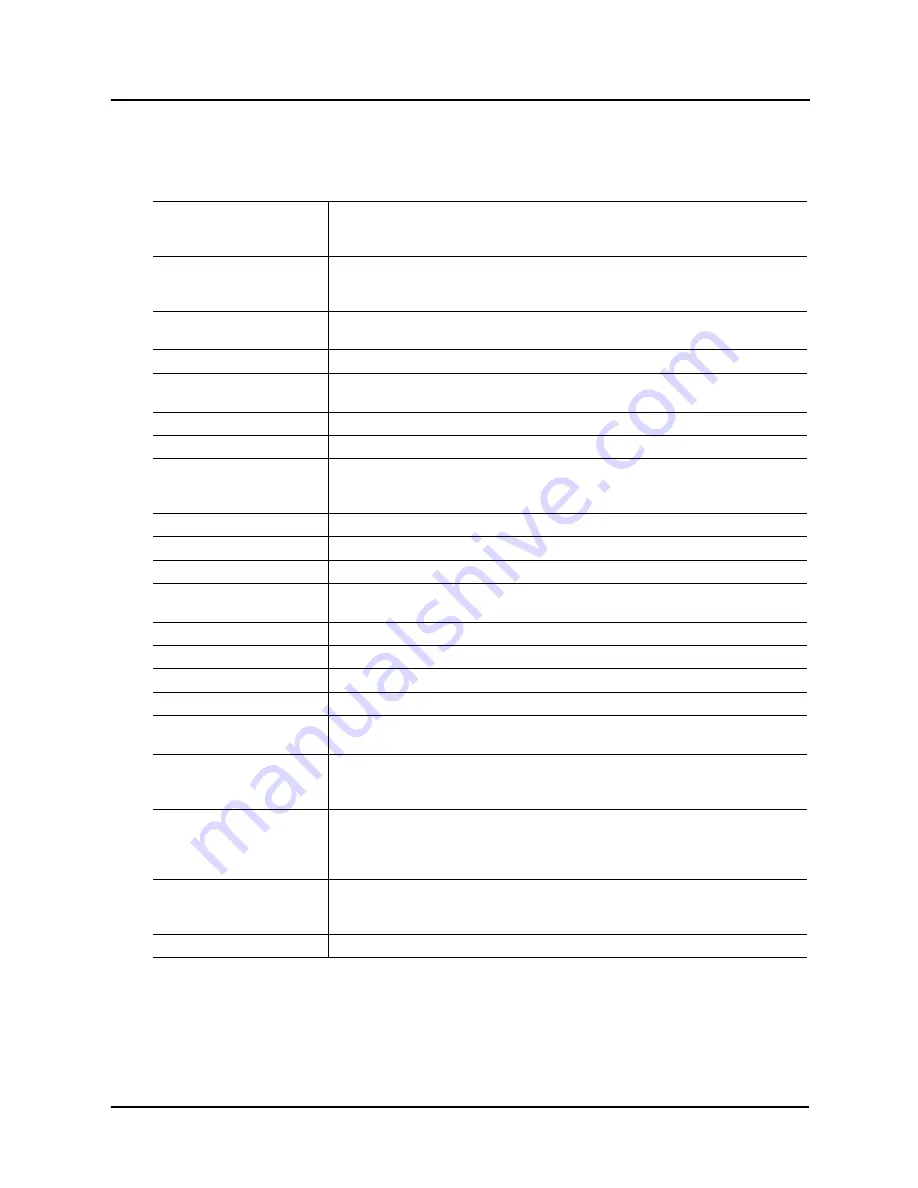
Control Features Specifications
Vin1 reference input
0-5/10 Vdc, 0/4-20 mAdc (250
Ω
load)
6FS pulse train input from another drive, 0-1/10/100 kHz pulse input, inverted
function, 0-5-10 bipolar input, broken wire detection. Span and offset adjustment.
Vin2 reference input
0-5/10 Vdc, 0-5-10 bipolar input, inverted function, broken wire detection, span and
offset adjustment. Programmable for frequency reference, current limit input, or
feedback signal.
Cin reference input
0/4-20 mAdc (50
Ω
load), inverted function, span and offset adjustment.
Programmable for frequency reference, current limit input, or feedback signal.
Reference voltage
10 Vdc (10 mAdc maximum)
Digital inputs - 10
Off=0 to 3 Vdc; On=10 to 32 Vdc (pull-up logic), selectable between pull-up and pull-
down logic
Digital supply voltage
24 Vdc (150 mAdc maximum)
Preset frequencies
4 inputs for 15 preset frequencies (selectable)
Digital outputs
2 SPDT relay outputs - 130 Vac, 1 A/250 Vac, 0.5 A
2 open collector outputs 50 mA per device; 2 optional relays; optional encoder
interface
Digital pulse train output
Open collector output pulse train proportional to output frequency
Vmet analog output
0 to 10 Vdc (5 mAdc maximum)
Imet analog output
0/4-20 mAdc output into a 500
Ω
load (maximum)
DC holding / injection braking
At start, stop, by frequency with adjustable current level and time or continuous DC
injection by digital input.
Current limit
Four quadrant adjustable from 5 to 150%
Speed ramps
Primary and alternate adjustable from 0.1 to 3200.0 seconds
Voltage boost
Adjustable fixed boost or adjustable auto boost
Voltage characteristic
V/Hz: Linear, pump, fan, or 2-piece linear. Also sensorless vector (SVC).
Timed overload
Adjustable inverse time trip (shear pin, 30 seconds, 60 seconds, 5 minutes), for
standard or inverter-duty motors
Protective features
Overcurrent, overvoltage fault, ground fault, short circuit, dynamic brake overload,
drive temperature, power wiring fault, drive timed overload, input voltage quality,
overvoltage ridethrough
Program Sequence Logic
Controller (PSLC)
25-step (with ability to branch), PLC-type functionality that can control speed,
direction, and ramps based on time, analog input, digital input, or pulse input.
Addressable outputs and real-time operations possible. See “Using the X5 Program
Sequencer” on page 111.
PID Feedback
Process control available with the use of a customer-supplied transducer, either 0-
10 Vdc, 4-20 mA, or optical encoder input to the drive. Includes an optional sleep
mode, activated when the loop is satisfied.
Serial communications
Modbus, DeviceNet option, Ethernet IP option, Modbus TCP/IP option







































































