





























TMP High Performance Vector Control Inverter User Manual
74
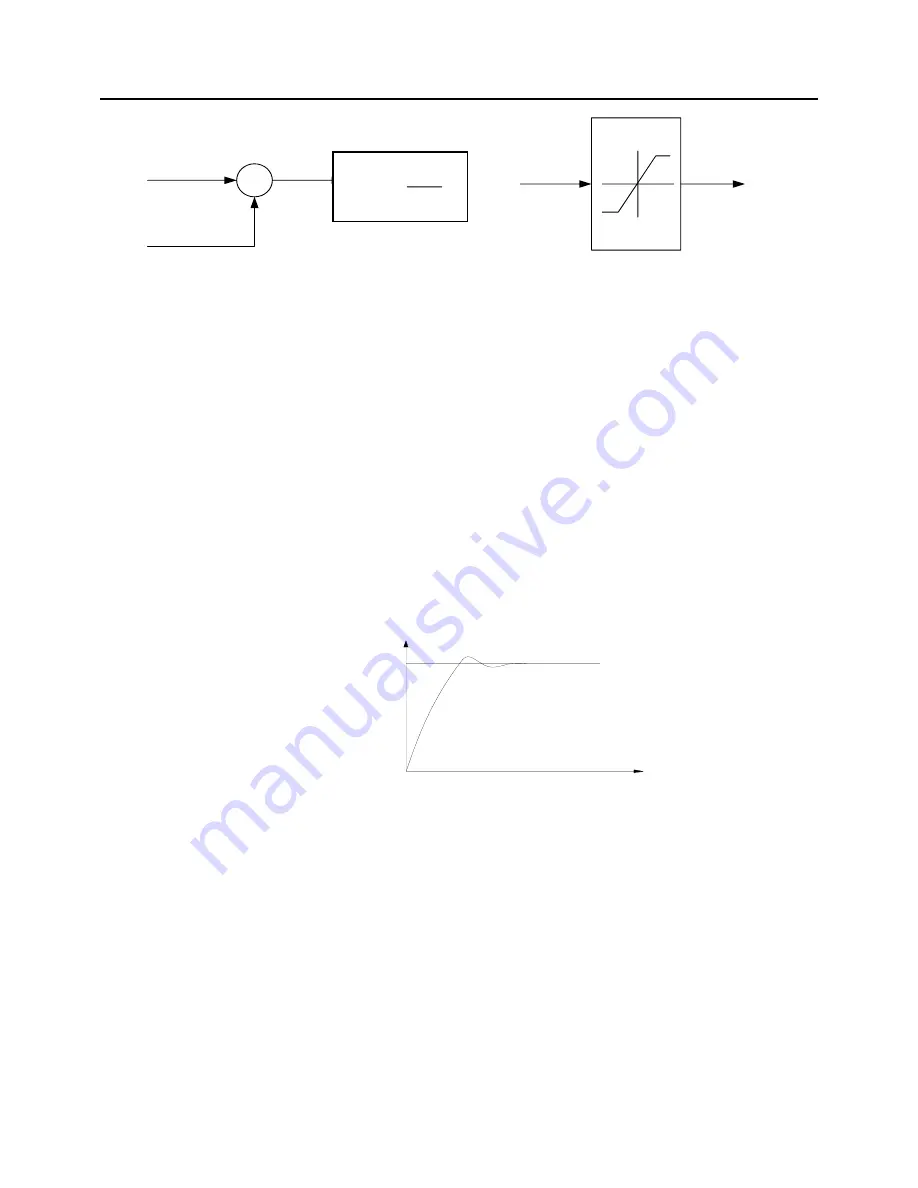
Speed error
Frequency
instruction
Actual speed
+
-
Torque limit
(
P5.07
,
P5.08
)
Given torque current
Fig. 6-14 Simplified block diagram of ASR
If the integral time is set to 0 (P5.01=0, P5.03=0), which means integral function is disabled,
and the speed loop is simply a proportion regulator.
a.
Adjustment of proportion gain P and integration time I for speed regulator
Increasing P will fasten system transient response, but system oscillation may occur
given too big P. Decreasing I will fasten transient response, but system oscillation and
overshoot may occur given too small.
Normally, user may tune P first, increase its value as long as no system oscillation
occurs; then adjust I, ensuring fast response without overshoot. Figure 6-15 shows
better speed step response if P, I are set properly. Speed response can be monitored
through analog terminals AO1 and AO2. Refer to P8 parameter group for detail
information.
Reference
speed
Fig. 6-15 Step response with better dynamic performance
)
KiS
1
+
(1
K
P